瓜分不了土地,但6D.ai可以瓜分画3D地图的工作给你


年假已过,胡吃海喝后发胖的你们是否还记得手机角落里那只嗷嗷待哺的呱儿子?
旅行青蛙这款游戏短暂的爆火之后,现在也回归了安静。人毕竟是社交的动物,对于如此佛系的游戏,相当多的玩家也许缺乏持续玩下去的动力。相似的是目前的AR/VR应用也大多谈不上什么互动和社交,每个人都困在自己的荒岛里,独自看着自己的风景却无法交流和分享,大家都玩着单机。
我们曾在 (再造一个和现实世界无缝衔接的虚拟世界) 中介绍过一种基于真实世界的虚拟空间构建,在 (Blippar发布AR导航应用,UVP定位系统) 中也能看到相似之处。在这样的构想里,AR将不再被独立于每个用户的设备之中,而是来到更大的工作空间理解世界并之互动,人们可以留下内容供他人查找使用,这就是AR云的概念。
AR云可以被认为是与真实世界1:1比例的虚拟空间,AR设备便是这个平行虚拟世界的实时接口,它完美地覆盖了物理世界。

AR云的构建首先要需要一个空间坐标体系,与真实世界完全对应。然而GPS等现有定位系统精度不理想,Google推出的VPS以及Blippar的UVP就旨在解决这个问题,只有高精度地解决了定位问题,才能连接真实世界与虚拟世界。
世界太大,用目前的各种3D地图创建办法都显得缺乏效率,而世界又每天在发生着变化,这样与之连接的虚拟空间也得随之更新,工作量不可谓不小。如何创建和更新这么复杂的AR云,众包是一个好的思路。

谷歌曾经重金收购了一家众包地图公司Waze,和一般地图不同的是用户可以在Waze实时分享路况等信息。应用本身收集够足够多用户反馈信息之后,便能够得出实时的交通情况而对其他用户提供更具效率的导航服务。
在别的领域,这样众包的思想也屡见不鲜。例如在 (谁才是最强室内定位) 中通过众包构建室内磁力地图的方案,成本低,效率高。
最近在AR云领域,一家名为6D.AI的创业公司崭露头角,他们的思路也在于众包。

ARcore和ARKit发布已久,搭载的手机与日俱增,虽然没有3D深度摄像头但是这些手机也初步具有感知空间的能力。对于每个用户来说这只是游戏开始前例行进行的空间扫描程序,但是当这些数据汇集进入云端,意义便大不一样。
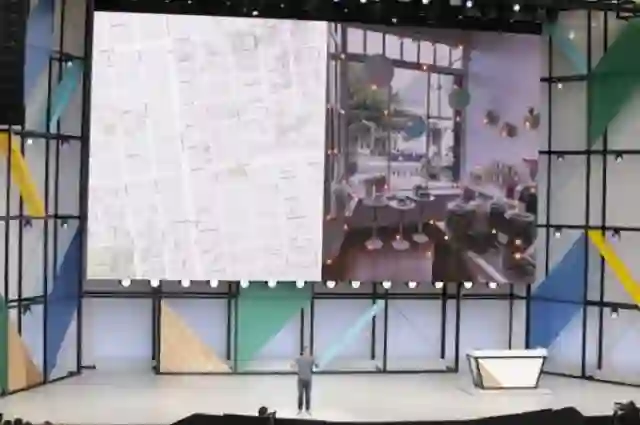
这家来自于牛津大学Active Vision实验室的年轻企业打算开展基于智能手机摄像头的三维世界地图众包活动。他们设想当用户使用基于ARKit和ARcore的应用时,后台使用摄像头感知周边空间环境,收集丰富的三维数据。

每个人贡献的只是一小块的空间信息,但是随着用户量的增多,越来越多的设备走向世界各地的每个角落,这就将建立起一个地面世界的庞大云图。当用户经过之前已经被先前用户探测过的区域时,6D.ai将下载该区域信息,并且利用新用户对空间的感知进一步提高所在位置的3D模型精度。也就是说,越多人使用,地图越大也越精确。
这样一来的好处是显而易见的,在AR云的帮助下AR多人游戏变得方便开展。基于现实地理坐标的AR形象将易于被其他设备观看。

6D.ai即将推出其AR云平台测试版,利用众包该平台构建实时3D密集网格数据,接下来他们会专注于获取识别几何体以方便建立多人游戏,增加了更多互动的可能性,AR也会更加好玩。
AR云也不尽然是个好东西,就像实名制一方面打击了犯罪另一方面又让人们在黑客面前毫无信息安全可言,在未来每个人的生活空间也变得不再私密,想想也是挺可怕的。

阅读推荐