关键点
- 将越来越多的自主无人机与有人驾驶飞机组合在一起,对于发展具有在同行冲突中竞争和获胜所需的复原力、能力和杀伤力的未来空军至关重要。
- 国防战略家、政策制定者和作战人员对自主性、人工智能及其目前的技术准备水平缺乏深入了解。这可能会滋生对采用这些关键技术的不信任和阻力。
- 需要一个框架来帮助美国国防界更好地了解不同的自主功能,然后定义和开发具有MUM-T行动所需的适当自主水平的系统。
- 需要一个由自主性的 "作战人员观点 "和 "工程师观点 "组成的两部分框架来指导该企业。"作战人员观点 "定义了无人机执行功能所需的不同自主水平,然后航空航天工程界--工程师观--可以用来定义和开发必要的技术和系统。
- 这个框架将帮助空军和国防部调整规模,加快下一代自主无人机队友的开发和投入使用,以保持对美国战略竞争对手的技术优势。
摘要
在过去十年中,美国空军发布的几乎所有愿景、战略和飞行计划都将下一代无人驾驶飞机、自主性和人工智能作为确保在未来战区获得决定性战斗优势的关键技术。空军目前正在开发新的作战概念,将有人驾驶的战斗机和轰炸机与自主无人驾驶飞行器(UAV)组成团队--称为有人-无人编队(MUM-T)--以执行打击、反空、电子战和其他任务。鉴于作战人员和工程师之间经常存在的脱节,开发这种能力具有挑战性。
目前,作战人员没有充分理解无人机需要什么样的自主权和多少自主权来实现预期行为。另一方面,工程师们往往不完全了解如何分解作战人员的操作性能要求,以使他们能够快速部署有效的系统。最重要的是,期望的作战效果和实现这些效果的技术途径之间的联系并不明确。因此,与之相关的愿景、战略、飞行计划、作战概念、计划以及自主飞行器(ATA)的无数研究和开发工作都没有以一种清晰和一致的方式结合起来。
一个代表作战人员和工程师观点的框架将为这两个群体在创建自主系统时提供一个结构和共同理解。"作战人员观点 "代表了作战人员如何在战斗空间中组织思维任务,可以整合不同层次的自主性。然后,"工程师观点 "可以利用这些任务来开发必要的具体算法、技术和系统,以提供满足作战人员需求和期望的自主团队飞机。本文提出了一个框架,以帮助空军作战人员、战略家和政策制定者更好地理解自主技术,并帮助指导企业走向未来人工智能赋能的美国行动。
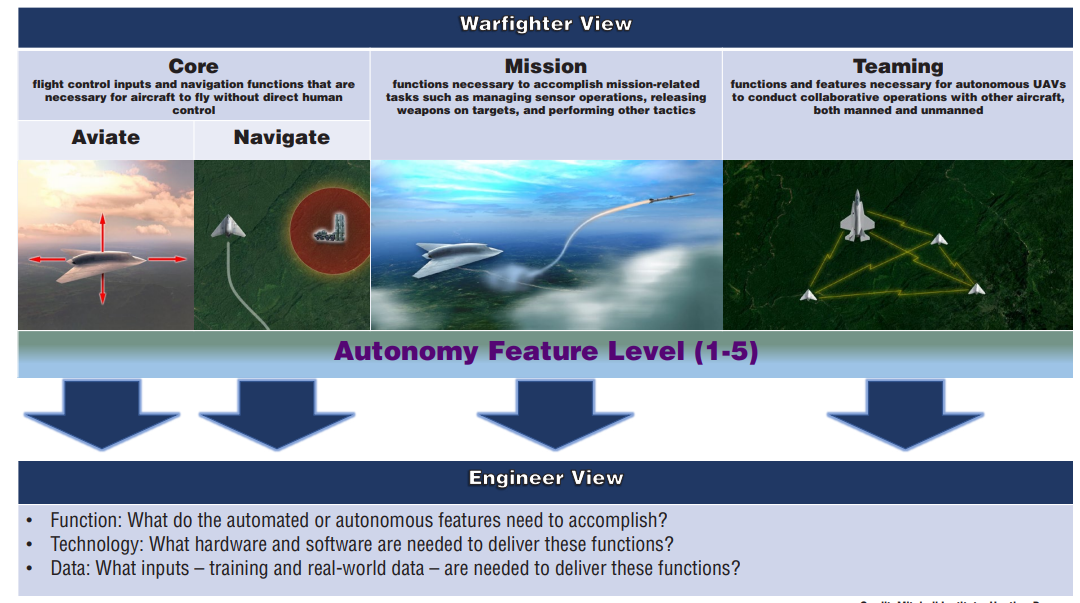
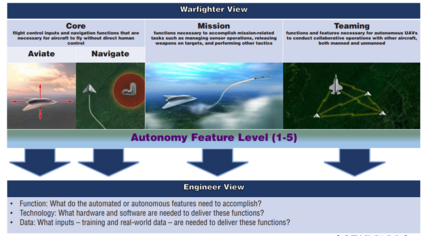
图1. 一个由两部分组成的框架概述,以提高作战人员对自主性的理解,并将他们的要求传达给开发和采购部门。
一个拟议的无人驾驶飞机自主性框架
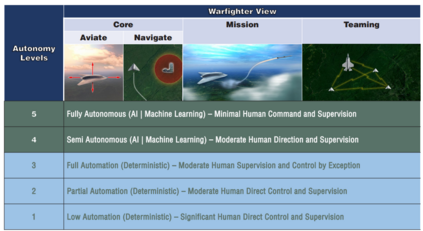
拟议的自主性框架中的 "作战人员观点 "有三个主要类别,每个类别又被细分为五个自主性级别。核心类、任务类和团队类反映了飞行员的认知任务,旨在为作战人员提供直观的信息,帮助他们表达对自主系统应如何执行的要求。核心自主性类别包括飞行控制输入和导航功能,这是飞机在没有人类直接控制的情况下飞行所必需的。任务类包括完成与任务有关的任务所必需的功能,如管理传感器操作、向目标释放武器和执行其他战术。协作类包括自主无人机与其他飞机(包括有人和无人)进行协作行动所必需的功能和特点。这三大类中的每一类又被细分为五个自主等级。第1级代表在执行任务时几乎没有自动化,第5级包括无人机完全自主执行的行动。
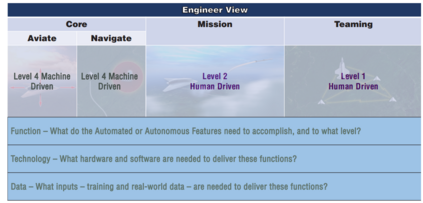
该框架的第二部分是工程师观点。工程师视图代表了作战人员视图的功能分解,将定义的类别和级别分解为功能、技术和数据。这种清晰的重点使工程师能够将他们的开发工作与所需的车辆属性和行为进行映射和优先排序。作战人员关注的是宏观层面的任务执行、操作行为和人类在行动中的作用,而工程师关注的是建立一个满足作战人员需求的自主系统所必需的基本功能、硬件、软件和数据。换句话说,工程师观点使航空航天工程师和技术专家能够将作战人员的要求解构为基础技术和基本的自主要素。
这两种观点共同充当了作战人员和工程师之间的连接组织和翻译。值得注意的是,这个框架并不打算成为一个规范或标准。这类似于SAE的自动驾驶框架,它说该框架的预期目标是 "描述性和信息性,而不是规范性"。本着这一精神,拟议的双视角自动驾驶框架的主要目的是使作战人员和航空航天工程师能够以结构化和一致的方式明确沟通和交流自主无人驾驶飞机的想法和要求。
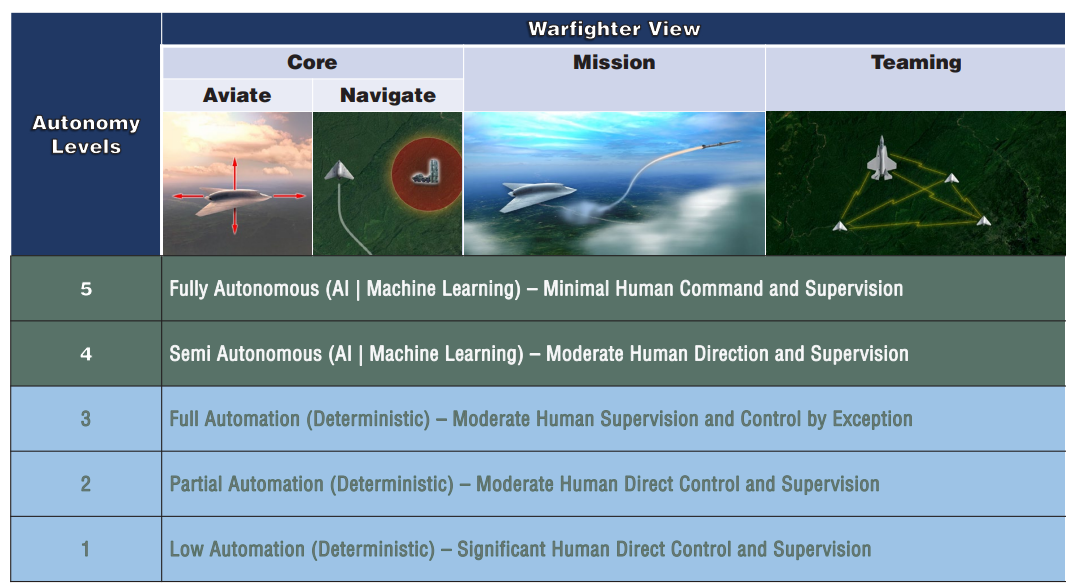
图6.作战人员观点:自主性类别和等级在作战人员视图中一起使用,形成一个描述无人驾驶飞机的操作行为和属性的评分标准。
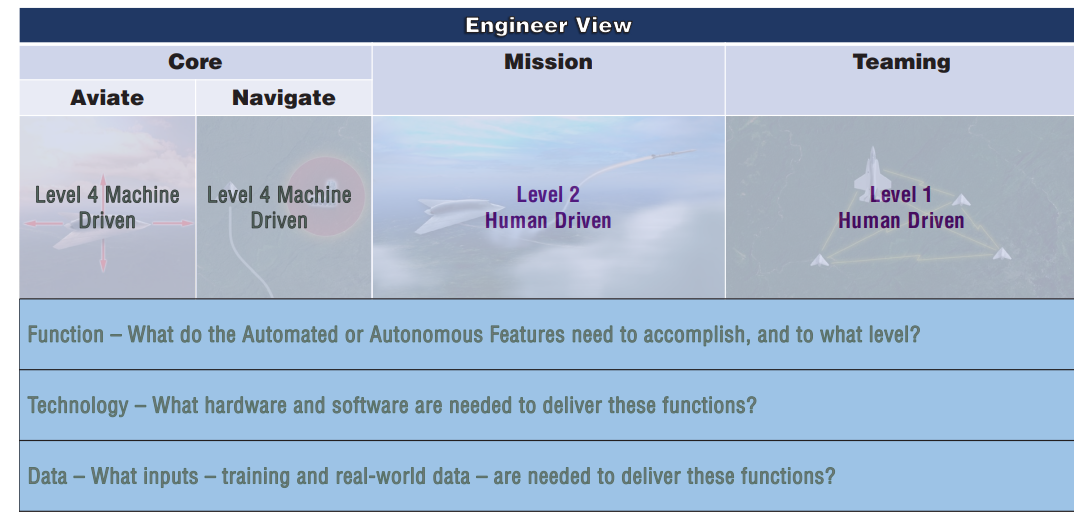
图8. 工程师视图从作战人员视图中获取每个自主性类别所需的自主性水平,并提供一种结构化的方式,将自主性能力分解为必要的功能、技术和数据。在这个例子中,作战人员视图为核心飞行和导航类别分配了4级自主权,同时为任务分配了2级,为团队分配了1级。