
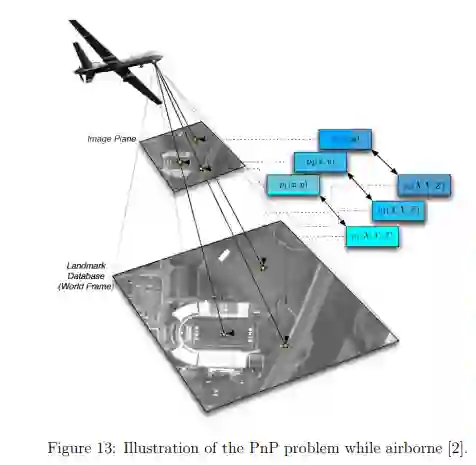
美国军方对全球定位系统 (GPS) 的依赖以及存在的漏洞强调了对替代导航技术的需求。替代导航方法不仅必须接近 GPS 的准确性,而且必须接近全球范围内的可用性。提供绝对定位估计的视觉辅助导航系统已经展示了接近 GPS 精度水平的令人鼓舞的结果。然而,它们仅限于海洋和其他地形特征较少的区域。使用地球磁异常场的磁导航已被证明是一种很有前途的替代方案,可以为导航系统提供全球范围的覆盖。
这项研究展示了磁性和视觉辅助导航系统的结合,使用扩展卡尔曼滤波器 (EKF) 来辅助飞机的惯性导航系统 (INS)。使用合成磁场测量和飞行测试计算机视觉数据表明,在计算机视觉数据长时间中断期间,磁导航可以将导航解决方案绑定到粗略的位置估计。一旦计算机视觉数据可用,视觉辅助导航系统就能够使用粗略的位置估计进行初始化,然后提供接近 GPS 水平精度的 10 米以下精度解决方案。此外,这项研究还展示了 F-16 飞行试验数据上的有限磁补偿方法和磁导航。有限的补偿能够将 F-16 的 10,000 纳特斯拉 (nT) 干扰场降低到大约 15nT。然后,补偿数据成功地用于磁导航。获得了一种有界导航解决方案,在导航级 INS 的情况下实现了大约 100 米的精度,在战术级 INS 的情况下实现了大约 1,000 米的精度。
成为VIP会员查看完整内容
相关内容

Arxiv
22+阅读 · 2021年12月22日
Arxiv
17+阅读 · 2021年6月18日
相关主题


相关VIP内容
相关资讯