
近年来,自主系统在海洋环境勘探开发领域得到广泛应用,主要源于大量未知未探区域(涵盖海洋与湖泊)的存在以及自主航行器应用场景的广泛性。自主海上系统以无人水面艇(USV)与自主水下航行器(AUV)为核心平台,其制导、导航与控制(GNC)架构对算法开发具有关键影响。本研究的最终目标是解决由USV与AUV构成的协同式自主海上系统GNC架构中带避障功能的路径跟踪算法所面临的设计、建模与实施挑战。
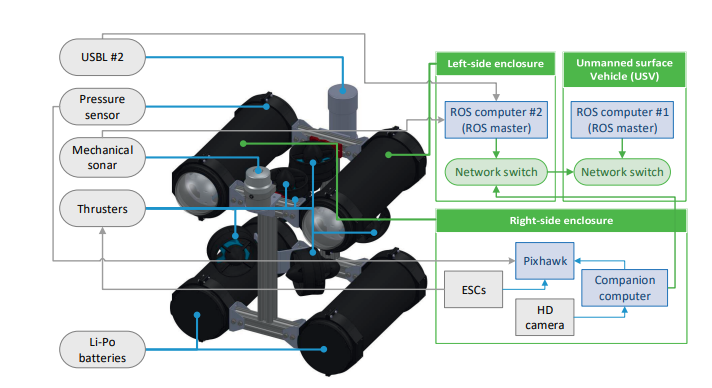
首先,本研究聚焦基于非线性运动方程构建数学模型,运用系统辨识(SI)与参数估计技术,并通过实测数据验证USV与AUV模型的有效性。其次,系统分析多种制导控制方法,重点关注路径跟踪与避障算法。GNC架构采用模块化分层设计,支持USV与AUV平台的算法快速验证,集成障碍物检测、路径跟踪及控制算法。仿真与实测试验结果表明该架构在单平台自主作业中具备可靠性能与实施可行性。最终,基于USV与AUV的独立开发成果,设计并实现完整协同式自主海上系统GNC架构。协同系统实施采用分布式控制技术,实现多平台信息融合与必要数据交互。
成为VIP会员查看完整内容
相关内容

Arxiv
224+阅读 · 2023年4月7日

相关VIP内容
相关资讯
相关论文
Arxiv
224+阅读 · 2023年4月7日