
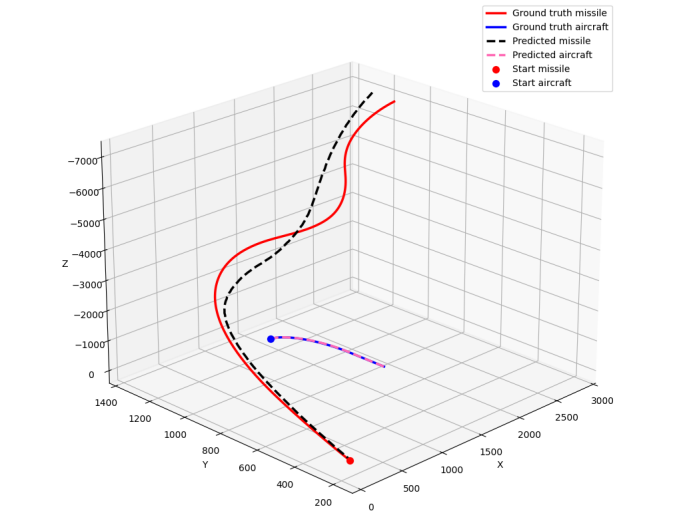
本文提出并评估两种深度学习模型,旨在支持并扩展瑞典国防研究局(FOI)当前使用的MATLAB/Simulink模型。这些模型用于执行不同作战场景(如飞行器与导弹对抗)的仿真模拟,但其计算资源密集特性限制了可高效探索的场景数量。为实现更快生成补充仿真数据,本研究采用近45,000组历史仿真场景训练了CNN-LSTM混合模型与基于Transformer架构的模型(iTransformer)。数据集包含静态输入参数及表征飞行器与导弹三维位置的多元时间序列数据。模型训练目标为基于初始条件预测轨迹延续,并通过标准回归指标与推理时间进行评估。结果表明:两种模型均能以低定位误差捕获多数轨迹模式,并显著缩短仿真耗时。
尽管直接比对非本研究主旨,但输入序列长度差异及降采样处理使所提模型无法直接相互比较或与MATLAB/Simulink模型对标。本文详述模型开发过程并讨论其局限性。虽需进一步验证,但结果证实深度学习模型具备与传统仿真方法协同加速场景生成的潜力。
成为VIP会员查看完整内容
相关内容

Arxiv
213+阅读 · 2023年4月7日
Arxiv
79+阅读 · 2023年4月4日
Arxiv
145+阅读 · 2023年3月29日

相关VIP内容
相关资讯
相关论文
Arxiv
213+阅读 · 2023年4月7日
Arxiv
79+阅读 · 2023年4月4日
Arxiv
145+阅读 · 2023年3月29日