![]() 传统的物体检测模型假设模型的训练和测试数据来自相同或相似的场景, 然而该假设在实际运用中难以满 足, 即检测模型被要求在不同的环境或场景下进行工作, 使得传统模型不可避免地受到影响, 导致检测精度明显下 降. 为了解决这个问题, 近年来跨域物体检测问题受到了广泛关注. 文中介绍了近几年跨域物体检测问题的发展历 程和相关方法, 将跨域物体检测方法归纳为基于迁移学习的、自学习的和图像生成的 3 大类. 其中, 基于迁移学习的 方法结合域适应和物体检测方法, 提升模型对不同环境的适应能力; 基于自学习的方法利用伪标签提升模型在目标 域上的迁移能力; 基于图像生成的方法利用生成式对抗网络生成相关的图像辅助模型训练, 提升模型在目标域的效 果. 同时, 介绍了用于跨域物体检测的相关数据集和代表性方法的性能. 最后总结跨域物体检测现阶段的分类以及 存在的不足, 并指出对未知域泛化性能的探索、数据隐私问题的解决, 以及视觉提示技术的应用等新发展方向.
传统的物体检测模型假设模型的训练和测试数据来自相同或相似的场景, 然而该假设在实际运用中难以满 足, 即检测模型被要求在不同的环境或场景下进行工作, 使得传统模型不可避免地受到影响, 导致检测精度明显下 降. 为了解决这个问题, 近年来跨域物体检测问题受到了广泛关注. 文中介绍了近几年跨域物体检测问题的发展历 程和相关方法, 将跨域物体检测方法归纳为基于迁移学习的、自学习的和图像生成的 3 大类. 其中, 基于迁移学习的 方法结合域适应和物体检测方法, 提升模型对不同环境的适应能力; 基于自学习的方法利用伪标签提升模型在目标 域上的迁移能力; 基于图像生成的方法利用生成式对抗网络生成相关的图像辅助模型训练, 提升模型在目标域的效 果. 同时, 介绍了用于跨域物体检测的相关数据集和代表性方法的性能. 最后总结跨域物体检测现阶段的分类以及 存在的不足, 并指出对未知域泛化性能的探索、数据隐私问题的解决, 以及视觉提示技术的应用等新发展方向.
![]()
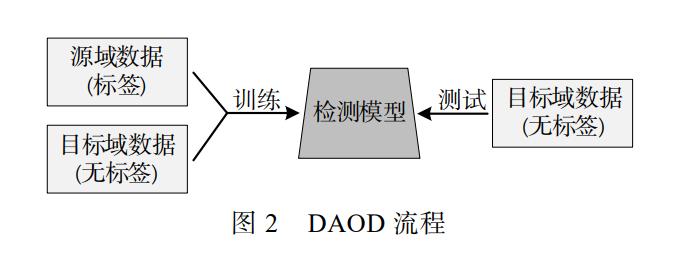
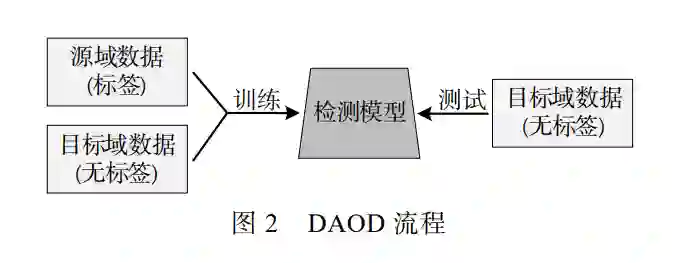
近年来, 随着深度神经网络的发展, 基于深度 学习的物体检测模型取得了巨大进步. 由于传统 的检测模型假设训练数据和测试数据来自相同或 者相似的分布(场景), 而该假设与现实开放环境下 的实际状况相违背, 开放环境包含多种未知因素 和变量, 如不同的光照条件、背景环境、视角、图 像采集器材、物体姿态等, 导致现有的检测模型难 以适应现实开放环境中常见的复杂场景变化. 通 过实验已经证明, 在场景变换的情况下, 传统的物 体检测模型的精度会受到较大的影响. 如图 1 所示, 通过实验直观地反映了场景变换 导致的检测精度下降的问题. 该实验利用晴天数 据(如第 1 行所示)训练一个传统检测检测器, 之后 对晴天数据进行加雾操作以模拟雾天的场景, 再 利用晴天数据训练的检测器进行测试, 其结果如 第 2 行所示. 可以看出, 传统检测器在面对天气变 化的时候, 其检测精度会大大下降, 反映了现有检 测模型难以适应实际应用中复杂场景变化的需求.为了使传统的检测模型对场景变化更加鲁棒, 近 年 来 , 跨 域 物 体 检 测 , 即 域 适 应 物 体 检 测 (domain adaptive object detection, DAOD), 受到了 极大的关注. 为了解决 DAOD 问题, 利用多场景 数据对模型进行训练是最直接的解决方案. 但是, 由于检测问题的标记数据难以获得, 对多场景进 行 数 据 的 标 记 和 训 练 成 本 颇 高 , 使 得当前 的 DAOD 模型往往基于无监督的迁移学习进行, 其 训练和测试设置如图 2 所示.
![]() 现有的 DAOD 参照无监督迁移学习问题的设 置, 将不同的场景分为源域和目标域 2 个场景, 其 中, 源域场景的数据包含人工标注的标签, 而目标 域场景则没有标签. 在训练时, 带标签的源域数据 和不带标签的目标域数据都参与训练, 并在目标 域上测试模型的跨域检测能力. DAOD 的无监督设 置有 2 个优点: (1) 利用带标签的源域数据和无标签数据就 能将模型迁移到其他场景, 大大减少了数据标注 的负担; (2) 在迁移的过程中, 由于目标域数据参与模 型的训练, 使得检测器对场景变换的鲁棒性增强, 在一定程度上解决了实际应用中的问题. 本文首先介绍近年来 DAOD 模型的大致发展 历程, 然后介绍一些相关的工作, 最后对相关方法 进行总结.
现有的 DAOD 参照无监督迁移学习问题的设 置, 将不同的场景分为源域和目标域 2 个场景, 其 中, 源域场景的数据包含人工标注的标签, 而目标 域场景则没有标签. 在训练时, 带标签的源域数据 和不带标签的目标域数据都参与训练, 并在目标 域上测试模型的跨域检测能力. DAOD 的无监督设 置有 2 个优点: (1) 利用带标签的源域数据和无标签数据就 能将模型迁移到其他场景, 大大减少了数据标注 的负担; (2) 在迁移的过程中, 由于目标域数据参与模 型的训练, 使得检测器对场景变换的鲁棒性增强, 在一定程度上解决了实际应用中的问题. 本文首先介绍近年来 DAOD 模型的大致发展 历程, 然后介绍一些相关的工作, 最后对相关方法 进行总结.