
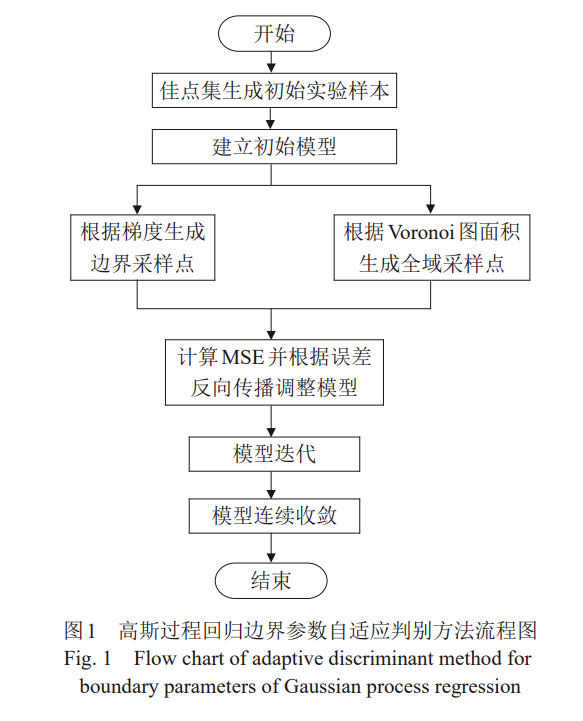
为有效应对仿真测试面临的维度灾难问题,降低传统全参数空间遍历中所需的仿真次数,需要获取针对性的仿真数据以准确反映实验数据建模特征,以较少的仿真次数获得信息量丰富且代表原始数据特征的样本。提出一种面向无人自主系统能力边界参数自适应判别的数字化仿真测试模型,采用多权重结构的佳点集进行初始构建,结合自适应核函数边界点判别算法,通过高斯过程回归对模型进行迭代优化,自适应地判别无人自主系统的能力边界。实验结果表明:该方法能够降低建模所需数据量,提高自适应参数边界判别的效率,为提升智能无人系统试验的效率提供了高效途径。
成为VIP会员查看完整内容
相关内容
Arxiv
1+阅读 · 2024年11月15日
Arxiv
224+阅读 · 2023年4月7日

相关VIP内容
相关资讯
相关论文
Arxiv
1+阅读 · 2024年11月15日
Arxiv
224+阅读 · 2023年4月7日