
在现代海战中,潜艇构成对军用及民用舰船的最大威胁之一。空化现象已被确认为水下辐射噪声的主要来源,并被用于定位水面舰艇。该问题作为降噪研究焦点,旨在降低军舰可探测性。本研究致力于梳理现行空化预防流程,识别相关船员职能分工,评估系统工作负荷。基于现役护卫舰高保真模拟推演与实战演练的观测数据,我们实施功能共振分析(FRAM)。所建模型揭示无空化航行现行流程,识别系统潜在失效节点,并提出增强流程韧性的路径。研究论证:接管空化起始预判功能的交互界面可辅助船员决策并降低认知负荷。
降低水下辐射噪声(URN)具有多重战略意义。其不仅对海洋生物产生显著负面影响[1-4],更危及冲突环境中的作战安全。反潜作战(ASW)作为现代海战核心环节,因潜艇具备常规武器与核武器的隐蔽投送能力而至关重要。先敌发现的优势适用于所有战争领域,海战领域亦不例外。自水听器问世以来,被动声呐侦测URN始终是发现敌舰及水下武器的核心手段[5-7]。潜艇尤其依赖被动声呐——其不暴露自身位置的特性维系了潜艇的隐身优势。通过舰体多水听器阵列对URN源的精确定位,潜艇无需使用主动声呐或上浮至潜望镜深度即可获取水面舰艇坐标[6]。
空化现象长期被确认为船舶URN的主要成因[8]。海事领域的空化特指螺旋桨空化——由桨叶在水中运动引发水压差导致的水体汽化现象[9-11]。水蒸气形成的气泡随桨叶运动最终内爆,产生的冲击波转化为声波。这种声学空化产生宽频谱URN,极易被水听器探测[12]。船舶设计师数十年来致力于降噪研究,尤以螺旋桨设计优化为重点[12-14]。鉴于螺旋桨全速运转(通常以每分钟转数RPM计)时几乎无法避免空化[15],桨叶设计力求最大效率。潜艇螺旋桨长期高度优化,其设计通常被列为国家机密。水面舰艇空化研究因材料侵蚀效应[11,16]及机动性损害[17]已开展多年,而空化特异的URN辐射直至近期才成为海军研究焦点。
通常以空化起始速度(CIS)作为舰船(级别)的恒定评估指标。但CIS实际受多重变量影响:舰体设计与损耗、海况、洋流、历史机动轨迹、盐度及螺旋桨桨距角等[12,18-23]。作为CISCON项目的组成部分,本研究旨在开发预测空化工具,辅助船员根据实时CIS调整航速。
鉴于CIS的影响变量多样性,研究提出三类控制方法:固定式、被动式与主动式。本研究聚焦主动式方法——船员在操作中可实施的措施。若条件允许,调整螺旋桨桨距角可改变CIS(桨叶攻角影响推力而无需改变推进单元转速)[24-25];另一普适性方法是降低螺旋桨RPM。相较之下,被动式方法关注船员不可控因素(如环境参数与他舰尾流);固定式方法则应用于建造或改装阶段(如螺旋桨与舰体设计)。后两类方法因无法应对航行中CIS动态变化而不适用于本项目。
本研究选定"通过RPM调整维持CIS阈值下运行"为核心方向。该主动方法具普适性,无需变距螺旋桨等特殊设备或舰体改造。但船员需实时获取当前CIS数据,这要求引入新型人机界面(HMI)。HMI的设计集成必须确保高可用性,其信息传递机制与空化预防流程将作为后续研究主题。在启动设计前,需充分理解该界面的应用场景——因其将在现有工作流中注入新增安全相关数据。必须深入考察当前信息处理网络并解析舰载工作压力。经与荷兰皇家海军(KM)四名指挥官初步论证,确定舰桥作为该系统的部署环境(因推进单元指令主要源自此处),故本研究以舰桥环境为框架。
舰桥在执行任务时呈现高压高风险工作环境,持续高认知负荷易引发操作员疲劳[26]。鉴于高警戒状态可能持续数日,操作员疲劳效应更为显著。任何新增界面(尤涉安全关键设施)在舰桥的集成必须最小化船员认知负荷增量。需首先厘清海军舰船现行空化预防流程,建立基准以人机工程学原则集成新系统,并向对应船员呈现必要空化信息。
本研究目标为:在反潜作战框架下,通过梳理现行无空化航行流程建立基准;探究顶层系统韧性;识别HMI可辅助环节。具体目标包括:(1)识别空化预防相关责任人 (2)绘制信息处理流 (3)映射子流程交互关系 (4)定位系统高变异性源头 (5)规划未来HMI的理想集成节点。基于目标清单,选用Hollnagel提出的功能共振分析方法(FRAM)[27]。虽考虑过层次分析法(AHP),但其适用于时序决策分析,而FRAM能揭示系统标称性能与工作负荷源,且能呈现变异性(对规划新增界面至关重要)。
FRAM为每个功能定义最多六个维度的连接节点:时间(T)指执行功能的时序条件(如特定时段或顺序);控制(C)描述监督调节机制;输入(I)是触发功能执行的要素及功能转化的对象;输出(O)是功能执行产物;前提(P)是启动功能所需的非触发条件;资源(R)是功能消耗或利用的要素。
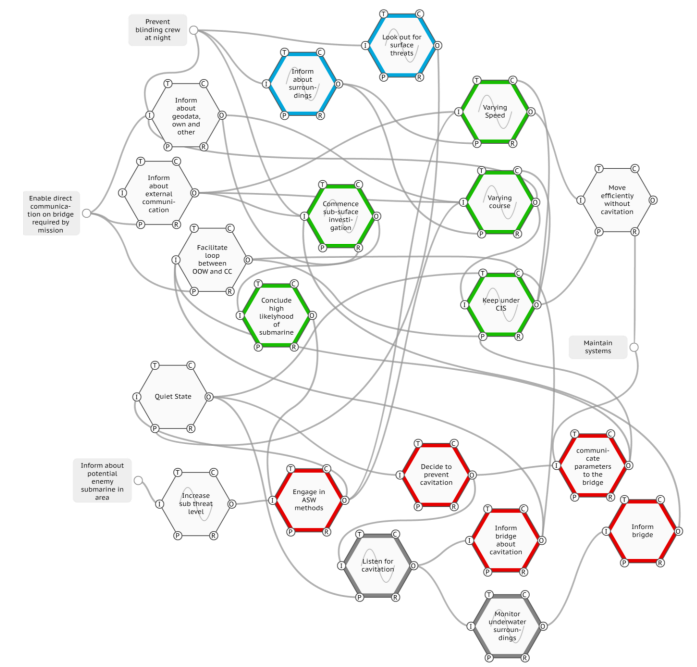
图1. FRAM模型可视化图示。功能以六边形表示,各顶点标注不同维度:输入(Input)、时间(Time)、控制(Control)、输出(Output)、资源(Resources)、前提(Precondition)。了望员执行功能标为蓝色,值班军官为绿色,指挥中心军官为红色,声呐操作员为灰色。功能内正弦波形标记表征变异性。

