本电子专著旨在呈现不同的战斗机无人机模型,用于防御和进攻性军事任务,并以人工智能(AI)和经济图形学(Ruiz Estrada, 2017)作为主要分析和理论框架来支持所有这些原型机的构建。本电子专著分为七个章节。第二章“用于无人机的多磁盘网络自主决策者人工智能映射(MNADMAI-Mapping)”基于一种先进的多层级巨量数据分析算法,并结合了一种新颖的数学和图形方法。该集成分析控制系统作为一个异常高效的编程工具脱颖而出,适用于多种无人机,包括用于空中任务的无人机。用于无人机的MNADMAI-Mapping的开发源于对尖端人工智能框架的迫切需求,该框架能够评估并在各种场景下自主决策行动方案,包括可能的冲突、国内争端和与边境相关的军事挑战,并延伸至广泛的潜在军事行动,无论是防御性还是进攻性性质。本质上,用于无人机的MNADMAI-Mapping服务于关键目的,即为武装力量(包括陆军、海军和空军)提供一种替代性人工智能系统,进一步增强其战略能力。
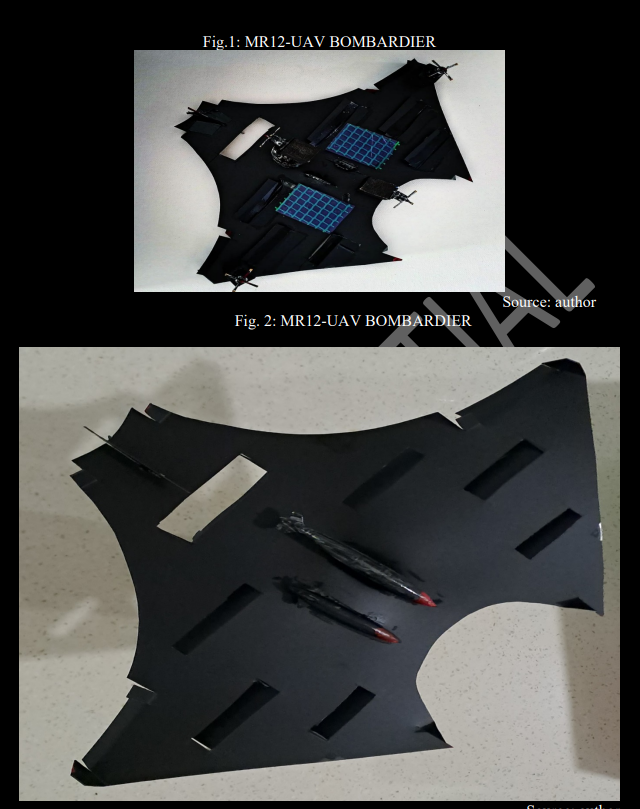
第三章介绍了一个名为“MR12-UAV轰炸机”的突破性原型。MR12-UAV轰炸机拥有一系列独特的特性和应用,本技术报告将详细说明。首先,我们主张在MR12-UAV轰炸机中实施“多副翼系统(MAS)”。这涉及将所有副翼战略性地布置在飞行器主体结构内部。此外,MR12-UAV轰炸机采用了一种创新的螺旋桨设计,称为“静音螺旋桨系统(SPS)”。该系统在主体结构内集成了一个强力电机,并配有一系列专用螺旋桨,这些螺旋桨精确同步运行,可将起飞和着陆噪音水平显著降低99.5%。此外,还集成了一个名为“敏感风系统(SWS)”的尖端概念,利用人工智能来提升性能。为了可持续性,MR12-UAV轰炸机配备了太阳能电池板,确保持续充电以同时支持其四个强力电机。值得注意的是,MR12-UAV轰炸机能够携带两个重型有效载荷(无论是炸弹还是导弹),用于空地和海空作战。最后,其多功能能力使得MR12-UAV轰炸机对于各种军事和国家紧急任务不可或缺。
第四章介绍了一个名为“自动定位传感表面抗湍流系统(ASSA-System)”的突破性原型,该原型集成于MRNSP-V.8-UAV的构建中。本报告全面概述了MRNSP-V.8-UAV的独特特性和多样化应用。首先,我们主张在本研究中实施“内部副翼系统(IAS)”。我们建议将所有的副翼纳入MRNSP-V.8-UAV的主体结构内部。同时,MRNSP-V.8-UAV在“抗噪音螺旋桨系统(APS)”下展示了一种新颖的螺旋桨设计。ASSA系统在其主体结构内包含一个强力电机,以及一系列复杂同步的专用螺旋桨,可在起飞、飞行和着陆期间实现97%的显著降噪。此外,我们引入了一个开创性概念:“制动敏感风系统(BSWS)”,它利用了人工智能的能力。自动定位传感表面抗湍流系统(ASSA-System)的多功能性延伸至军事应用和自然灾害发生时的国家救援工作。
第五章介绍了名为“MR1-UAV”的创新原型,概述了其独特特性和多样化的应用范围。本研究的一个主要重点是实施“静音螺旋桨系统(QPS)”。MR1-UAV在其核心结构内集成了一个强劲的电机,并配有一系列精心同步的专用螺旋桨,可在起飞、飞行和着陆阶段将噪音水平显著降低97%。此外,提出了“超敏感风系统(UWS)”的开创性概念,利用人工智能来提升性能。MR1-UAV的多功能性延伸至涵盖军事、商业和关键的国家紧急任务。
第六章展示了MULTICOPTER MR10-UAV概念,它在一个统一结构内采用了战略布局的一组螺旋桨(Jones, 2017)。这种配置在起飞时最大化能效,并在着陆时最小化冲击力。通过紧密互联十个螺旋桨,实现了一个独特且协调的推进系统, enabling 快速且安全的飞行。MULTICOPTER MR10-UAV包含一个整体螺旋桨系统,称为“紧密集成螺旋桨系统(CIPS)”(参见图1、2、3、4和11)。该设计集成了十个强劲的电机,每个电机配备一个独立电池,增强了其飞行续航能力。这些电机高精度同步和谐运行,导致起飞和着陆噪音水平降低99%。此外,MR10-UAV拥有可靠且高效运输大量有效载荷的能力。其多功能性延伸至广泛的应用,包括但不限于商业项目、物流运营、军事行动以及应对国家紧急情况。
最后,第七章介绍了“多层级无人机国家情报安全系统(CORAZA-System)”。我们评估了多层级巨量数据分析框架的有效性,并结合使用多维图形作为人工智能中的强大分析工具。这种方法为理解和应对复杂的军事和国家安全挑战提供了一个整体视角。开发CORAZA系统的主要动力是提供一种新的人工智能工具,能够有效评估动态和复杂的场景,包括潜在的战争、冲突和边境问题。该工具旨在以全面的方式评估各种策略。因此,CORAZA系统努力为武装部队、情报机构和政府提供一种替代性的人工智能方法。
用于无人机的MNADMAI-Mapping理论框架
用于无人机的MNADMAI-Mapping涉及五个基本阶段:
I. 输入和巨量数据库信息存储
初始阶段包括持续输入和存储巨量数据库信息,涵盖定量和定性数据。
II. 实时多维图形可视化
第二阶段侧重于多维图形的实时可视化。
III. 警报潜在军事目标
在第三阶段,系统对位于图形空间内不同位置的潜在军事目标提供警报。
IV. 搜索战略目标
第四阶段涉及系统性地搜索潜在战略目标,考虑因素包括位置、距离、天气条件和时机,基于用于无人机的MNADMAI-Mapping中的图形表示。
V. 最终报告和建议
第五也是最后阶段最终形成一份综合报告,提供一份简明的建议或意见列表,用于在用于无人机的MNADMAI-Mapping内攻击或防御不规则或不稳定的位置。