
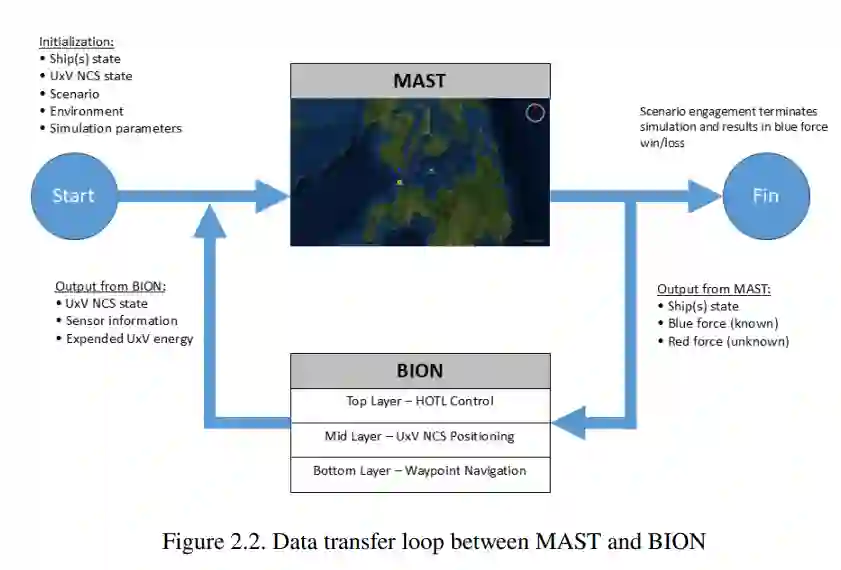
本论文探讨了如何应用有监督的机器学习技术来提高网络控制系统(NCS)的性能和可解释性。无人驾驶系统(UxVs)可通过覆盖大片区域的延伸侦察任务提供快速高效的目标定位。以协作方式控制一组 UxV 是一个难题,美海军正在开发的一个解决方案是网络控制系统行为集成优化(BION)。BION 是一种 NCS,利用部分可观测蒙特卡洛规划(POMCP)算法提供接近最优的近实时编队控制。本文旨在通过使用训练优良的神经网络近似关键功能,解决 POMCP 算法的某些局限性。神经网络利用概率技术和显著性图提高了可解释性,同时也提高了处理速度。在基于 ResNet 的不同架构上进行了实验,并成功地将训练良好的神经网络集成到了 BION 中。这项研究拓展了实验和开发 BION 的能力,从而推动了UxV 的开发和集成。
第二章将讨论 BION 的核心功能,以及与神经网络和显著性图谱相关的关键概念。第三章将讨论实现过程,包括训练和评估数据、神经网络架构、神经网络训练算法以及生成显著性图。第四章将介绍工作成果,包括训练统计数据和计算出的显著性图样本。第 5 章总结了本文的贡献以及未来可能的工作领域。
成为VIP会员查看完整内容
相关内容

Arxiv
225+阅读 · 2023年4月7日
Arxiv
153+阅读 · 2023年3月29日


相关VIP内容
相关资讯
相关论文
Arxiv
225+阅读 · 2023年4月7日
Arxiv
153+阅读 · 2023年3月29日