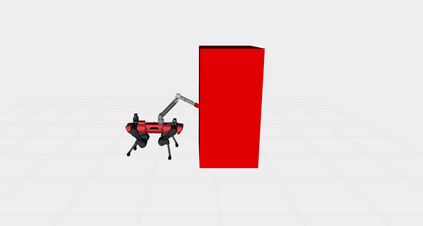
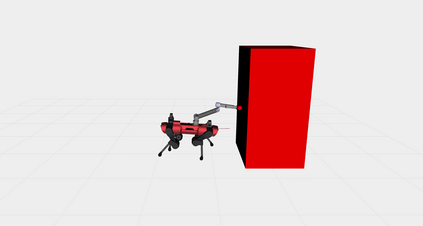
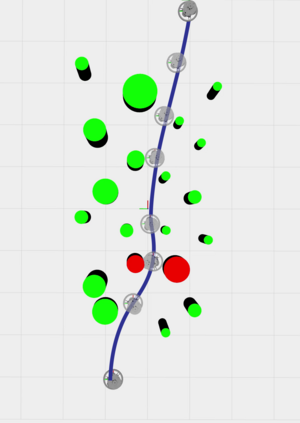
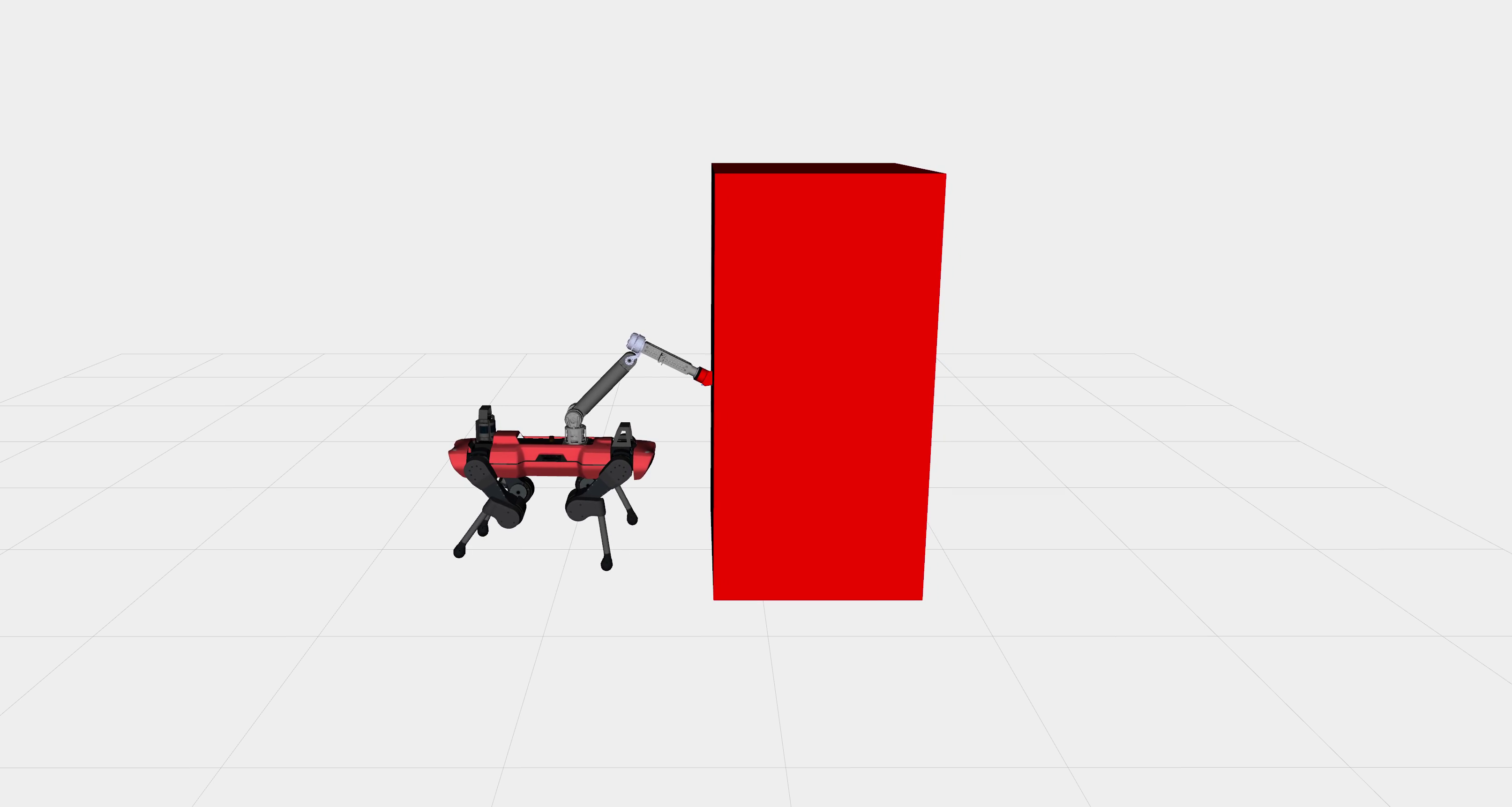
The Sequential Linear Quadratic (SLQ) algorithm is a continuous-time variant of the well-known Differential Dynamic Programming (DDP) technique with a Gauss-Newton Hessian approximation. This family of methods has gained popularity in the robotics community due to its efficiency in solving complex trajectory optimization problems. However, one major drawback of DDP-based formulations is their inability to properly incorporate path constraints. In this paper, we address this issue by devising a constrained SLQ algorithm that handles a mixture of constraints with a previously implemented projection technique and a new augmented-Lagrangian approach. By providing an appropriate multiplier update law, and by solving a single inner and outer loop iteration, we are able to retrieve suboptimal solutions at rates suitable for real-time model-predictive control applications. We particularly focus on the inequality-constrained case, where three augmented-Lagrangian penalty functions are introduced, along with their corresponding multiplier update rules. These are then benchmarked against a relaxed log-barrier formulation in a cart-pole swing up example, an obstacle-avoidance task, and an object-pushing task with a quadrupedal mobile manipulator.
翻译:连续线性二次曲线(SLQ)算法是众所周知的差别动态编程(DDP)技术的连续时间变式,使用高斯-牛顿黑森近似近似法。由于机器人在解决复杂的轨迹优化问题方面的效率,这一组方法在机器人界已越来越受欢迎。然而,基于DDP的配方的一大缺点是无法适当地纳入路径限制。在本文件中,我们通过设计一个有限的SLQ算法来解决这一问题,该算法处理各种制约,同时采用以前实施的投影技术和新的扩增Lagrangian方法。我们通过提供适当的倍增法,并通过解决单一的内外循环循环变换法,能够以适合实时模型预测控制应用程序的速率找到非优化的解决方案。我们特别侧重于受不平等限制的案例,即引入了三种强化的Lagrangi刑罚功能及其相应的倍数更新规则。这些功能随后以在马车柱上摇摆动的松动式逻辑屏障配制为基准,是一种障碍式移动式的移动任务、移动任务和对象任务等任务。