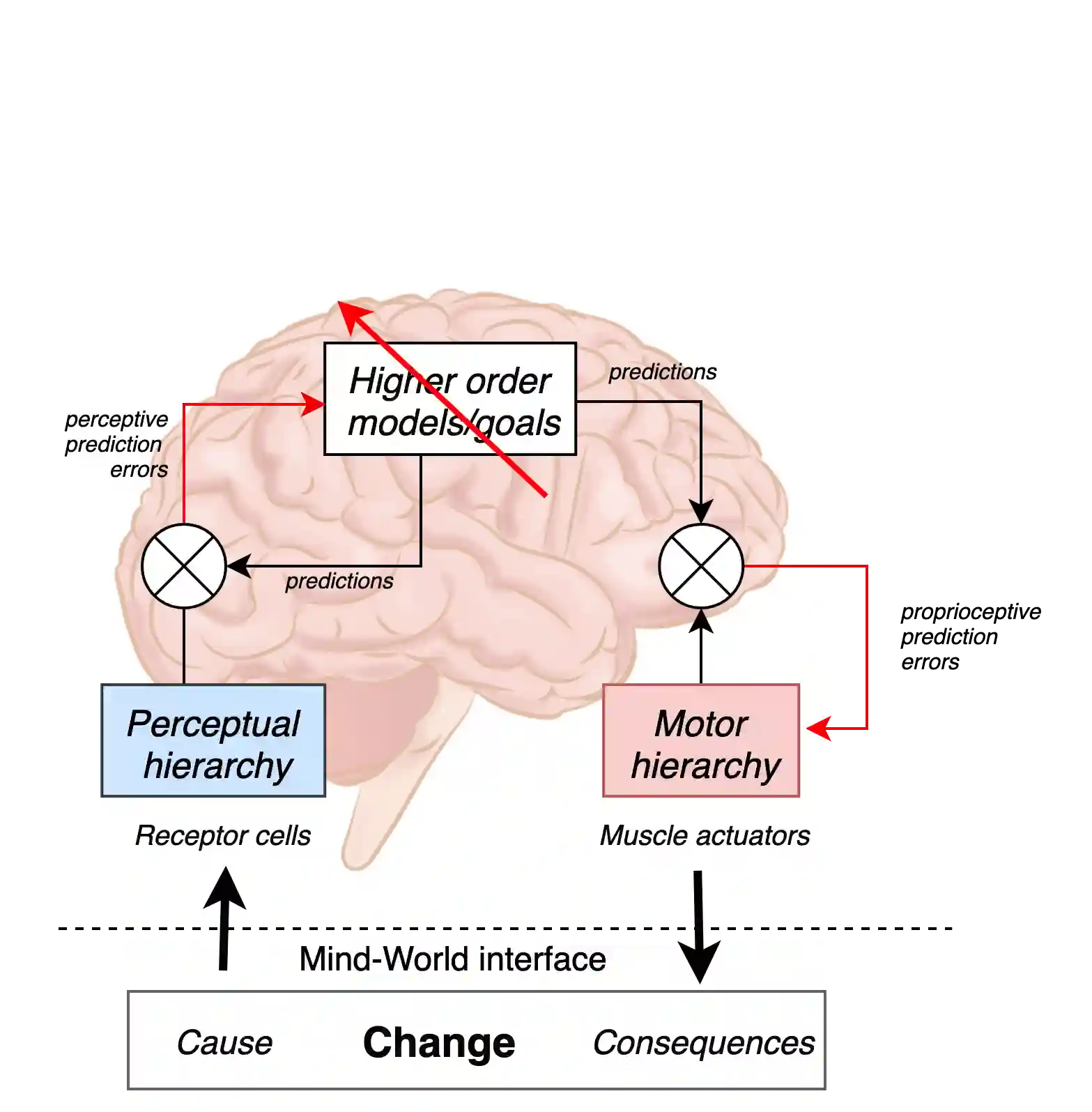
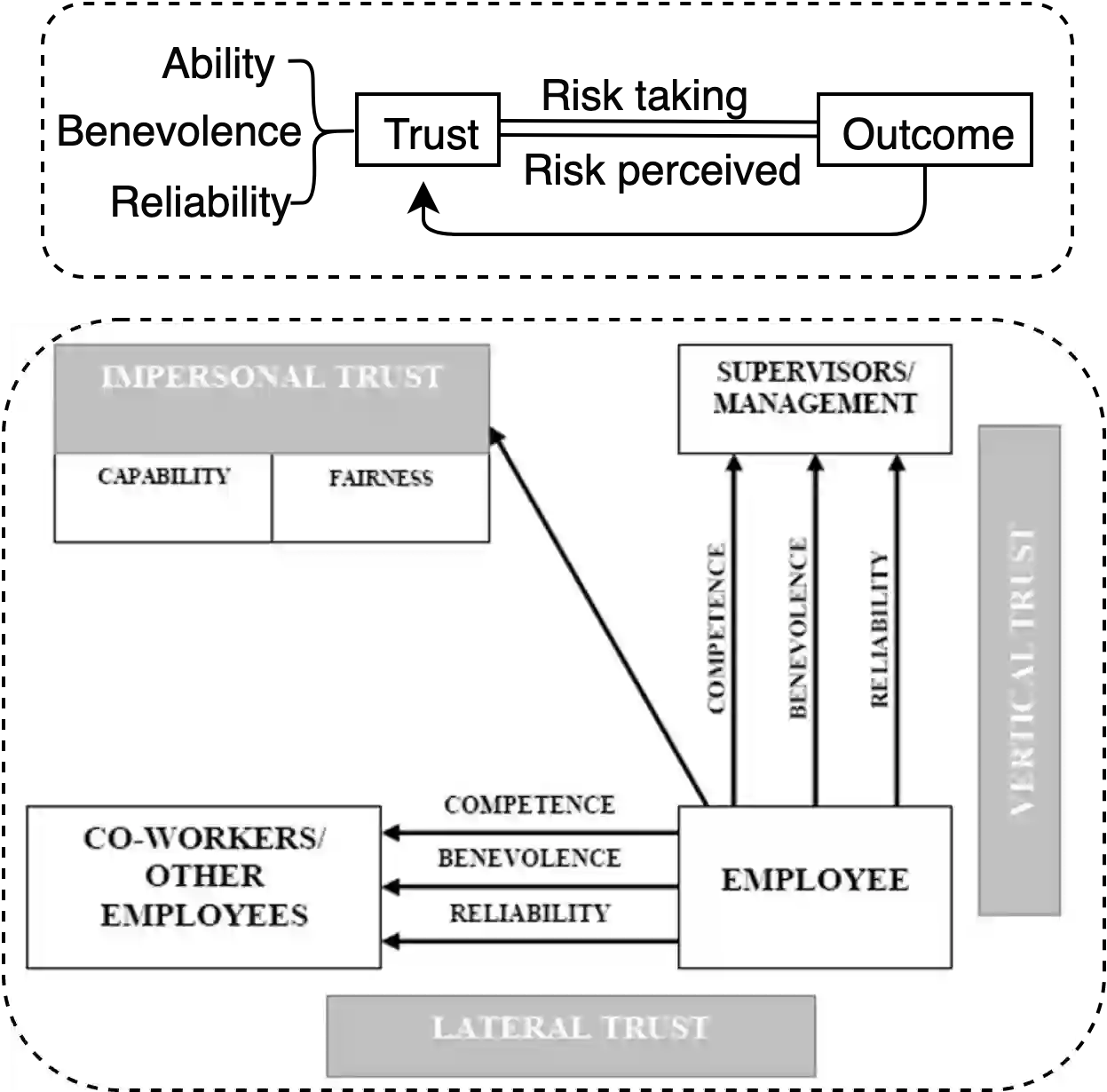
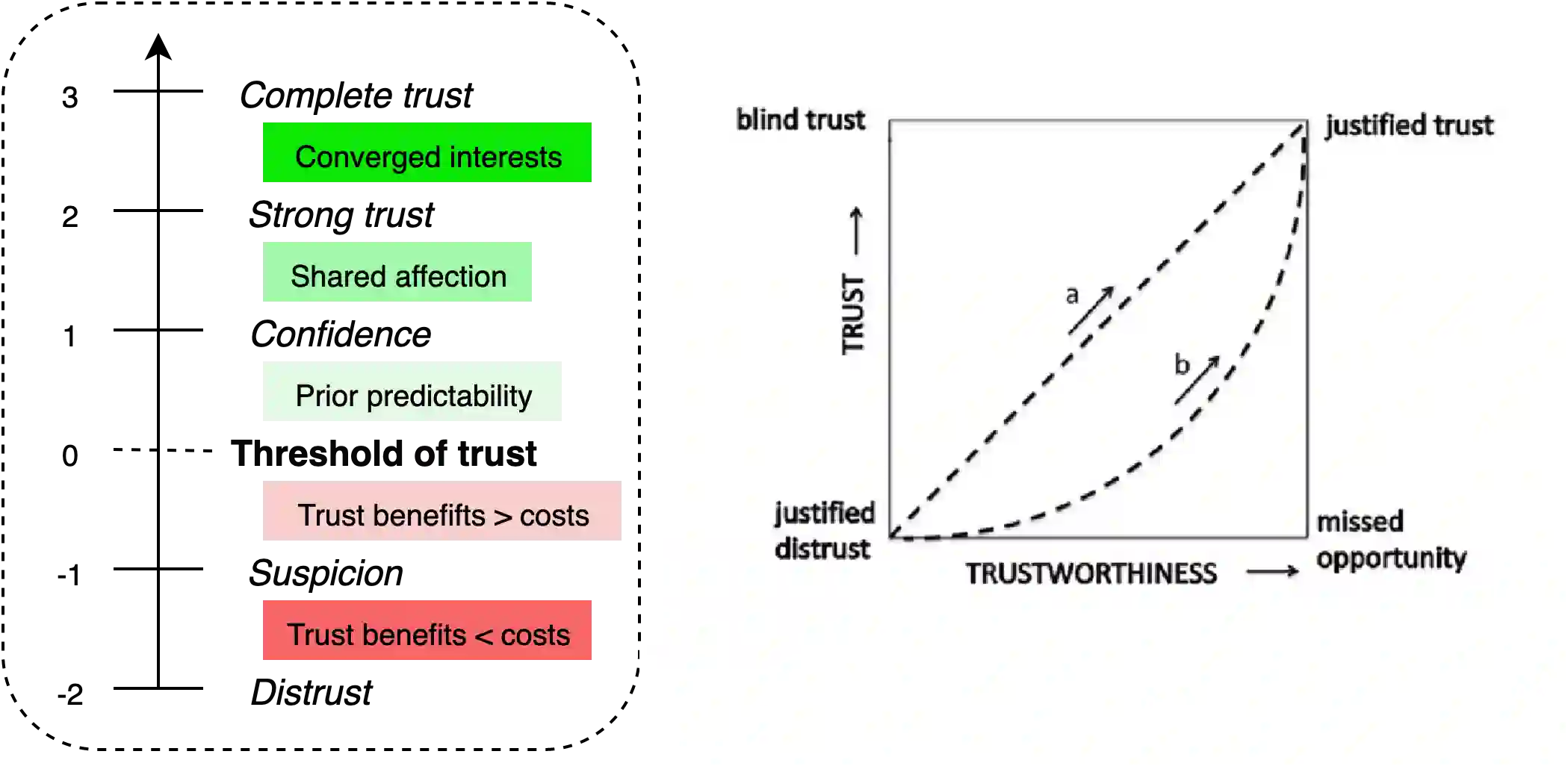
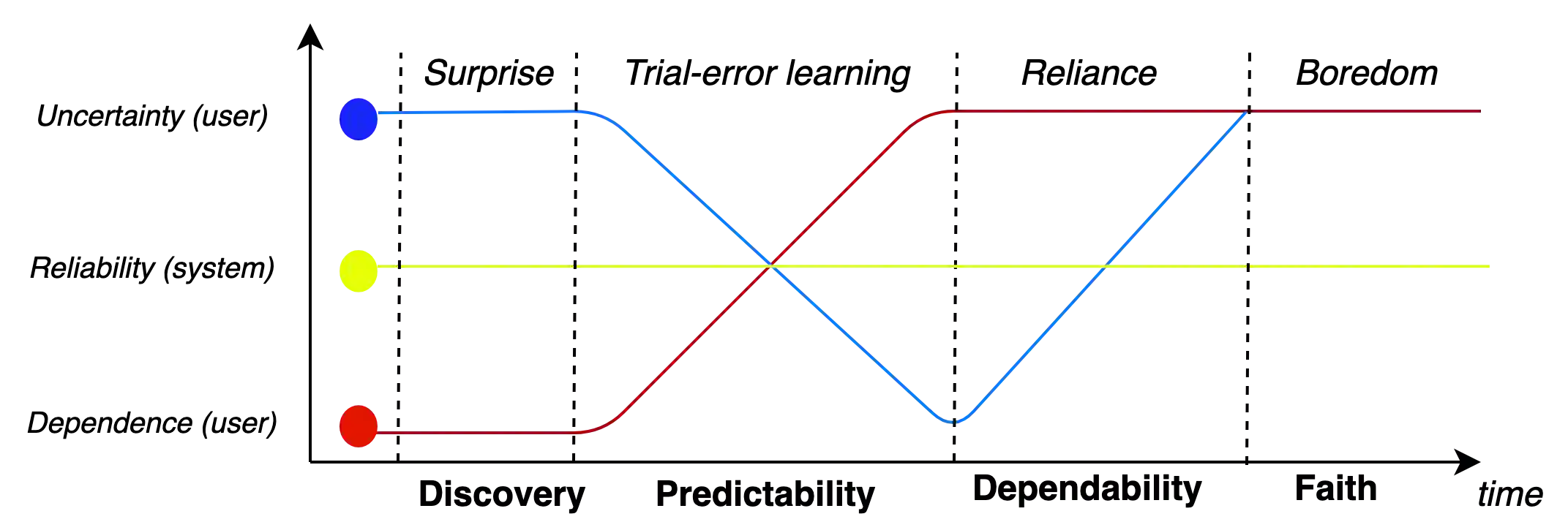
To interact seamlessly with robots, users must infer the causes of a robot's behavior and be confident about that inference. Hence, trust is a necessary condition for human-robot collaboration (HRC). Despite its crucial role, it is largely unknown how trust emerges, develops, and supports human interactions with nonhuman artefacts. Here, we review the literature on trust, human-robot interaction, human-robot collaboration, and human interaction at large. Early models of trust suggest that trust entails a trade-off between benevolence and competence, while studies of human-to-human interaction emphasize the role of shared behavior and mutual knowledge in the gradual building of trust. We then introduce a model of trust as an agent's best explanation for reliable sensory exchange with an extended motor plant or partner. This model is based on the cognitive neuroscience of active inference and suggests that, in the context of HRC, trust can be cast in terms of virtual control over an artificial agent. In this setting, interactive feedback becomes a necessary component of the trustor's perception-action cycle. The resulting model has important implications for understanding human-robot interaction and collaboration, as it allows the traditional determinants of human trust to be defined in terms of active inference, information exchange and empowerment. Furthermore, this model suggests that boredom and surprise may be used as markers for under and over-reliance on the system. Finally, we examine the role of shared behavior in the genesis of trust, especially in the context of dyadic collaboration, suggesting important consequences for the acceptability and design of human-robot collaborative systems.
翻译:为了与机器人进行无缝互动,用户必须推断机器人行为的原因,并相信这种推断。 因此,信任是人类-机器人合作的必要条件。 尽管信任具有关键作用,但人们在很大程度上不知道信任是如何出现、发展和支持与非人类工艺品的人类互动的。 我们在这里审查关于信任、人类-机器人互动、人类-机器人合作和整个人类互动的文献。 早期信任模式表明,信任意味着在仁慈和能力之间要取舍,而人与人之间的互动研究则强调共同行为和相互知识在逐步建立信任中的作用。 我们随后引入信任模式,作为代理人与扩大的汽车工厂或伙伴进行可靠的感官交流的最佳解释。 这种模式的基础是关于信任、人类-机器人互动、人类-机器人合作以及人类互动的认知神经科学。 在人权理事会的背景下,信任可以表现在虚拟控制一个人工剂上。 在这种背景下,互动反馈成为信任人-人类认知-行为循环的一个必要组成部分。 由此形成的信任模式对于理解人类-行为模式,最终定义了人类- 定义的决定因素互动和协作作用,在人类- 定义人类- 定义人类- 模式下,在人类- 信任的认知- 工具中, 意味着, 信任的认知- 工具- 的认知- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具- 工具-