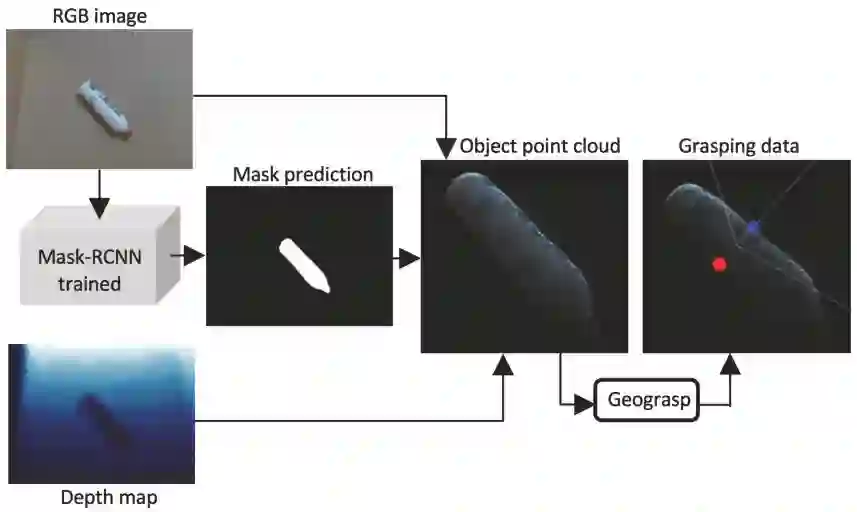
This paper presents an AI system applied to location and robotic grasping. Experimental setup is based on a parameter study to train a deep-learning network based on Mask-RCNN to perform waste location in indoor and outdoor environment, using five different classes and generating a new waste dataset. Initially the AI system obtain the RGBD data of the environment, followed by the detection of objects using the neural network. Later, the 3D object shape is computed using the network result and the depth channel. Finally, the shape is used to compute grasping for a robot arm with a two-finger gripper. The objective is to classify the waste in groups to improve a recycling strategy.
翻译:本文介绍了用于定位和机器人捕捉的人工智能系统。实验设置基于一项参数研究,对基于Mask-RCNN的深层学习网络进行培训,以便利用五个不同类别在室内和室外环境中进行废物定位,并生成新的废物数据集。该实验系统最初获得环境的RGBD数据,然后通过神经网络探测物体。随后,利用网络结果和深度通道计算3D物体形状。最后,该形状用于计算用双指抓抓器捕捉机器人臂的机器人臂。目标是将废物分类成一组,以改进回收战略。