
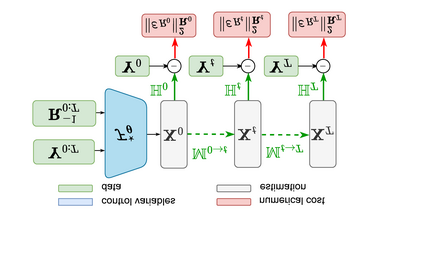
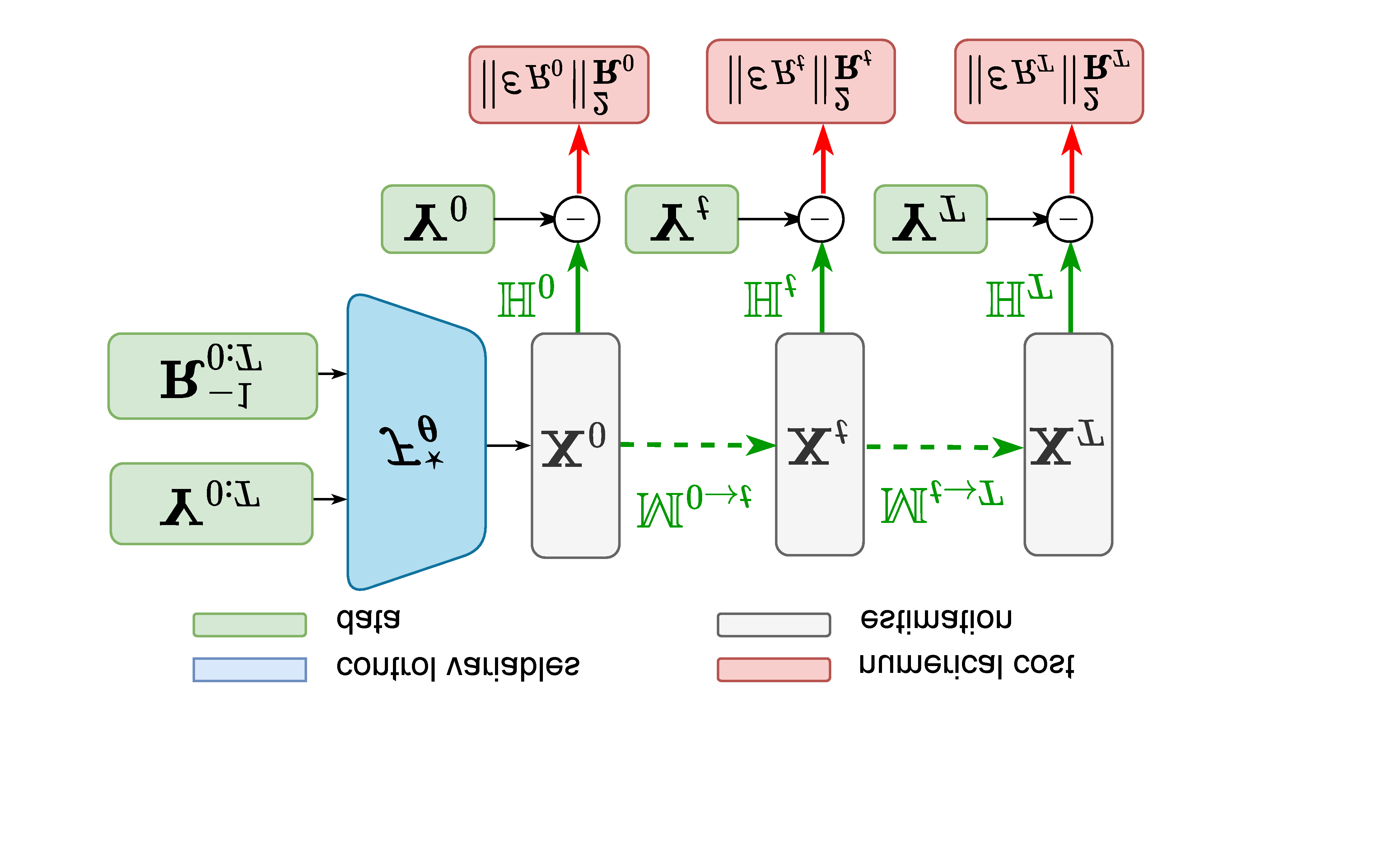
Variational data assimilation and deep learning share many algorithmic aspects in common. While the former focuses on system state estimation, the latter provides great inductive biases to learn complex relationships. We here design a hybrid architecture learning the assimilation task directly from partial and noisy observations, using the mechanistic constraint of the 4DVAR algorithm. Finally, we show in an experiment that the proposed method was able to learn the desired inversion with interesting regularizing properties and that it also has computational interests.
翻译:变式数据同化和深层次学习有着许多共同的算法方面。 前者侧重于系统状态估算,而后者则为学习复杂的关系提供了巨大的感性偏差。 我们在这里设计了一个混合结构,利用4DVAR算法的机械性制约,直接从局部和吵闹的观测中学习同化任务。 最后,我们在实验中显示,拟议方法能够从有趣的规范属性中学习到理想的反向,它也有计算利益。
相关内容
专知会员服务
54+阅读 · 2020年1月30日
专知会员服务
19+阅读 · 2019年10月22日
Arxiv
0+阅读 · 2023年1月13日
Arxiv
12+阅读 · 2021年2月21日



相关VIP内容
专知会员服务
54+阅读 · 2020年1月30日
专知会员服务
19+阅读 · 2019年10月22日
相关资讯
相关论文
Arxiv
0+阅读 · 2023年1月13日
Arxiv
12+阅读 · 2021年2月21日