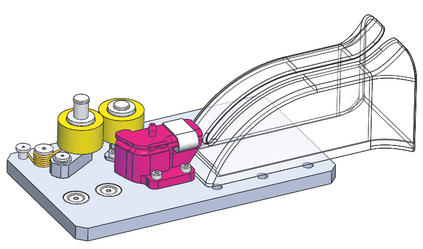
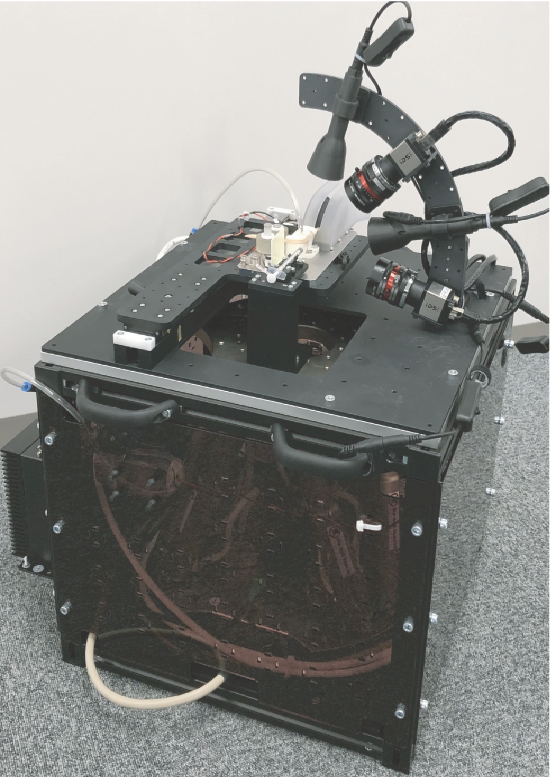
In this paper, we present a robotic device for mouse tail vein injection. We propose a mouse holding mechanism to realize vein injection without anesthetizing the mouse, which consists of a tourniquet, vacuum port, and adaptive tail-end fixture. The position of the target vein in 3D space is reconstructed from a high-resolution stereo vision. The vein is detected by a simple but robust vein line detector. Thanks to the proposed two-staged calibration process, the total time for the injection process is limited to 1.5 minutes, despite that the position of needle and tail vein varies for each trial. We performed an injection experiment targeting 40 mice and succeeded to inject saline to 37 of them, resulting 92.5% success ratio.
翻译:在本文中,我们展示了用于老鼠尾静脉注射的机器人装置。 我们提议了鼠标持有机制,以便在不给老鼠麻醉的情况下实现静脉注射, 它由止血带、真空端口和适应性尾端固定物组成。 目标静脉在3D空间的位置由高分辨率立体视觉重建。 静脉由简单但稳健的静脉线探测器检测出来。 由于拟议的两阶段校准过程, 注射过程的总时间限制在1.5分钟之内, 尽管每次试验的针头和尾静脉的位置各不相同。 我们针对40只小鼠进行了注射实验, 成功注射了37只针线, 成功率达到了92.5% 。