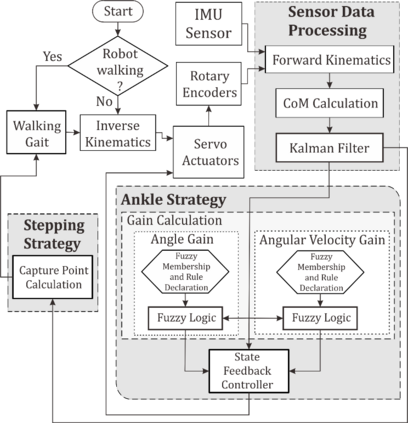
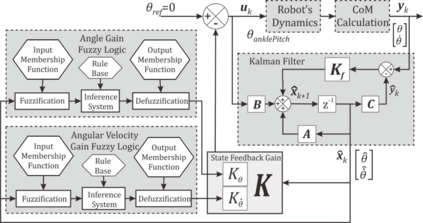
This paper aims for a controller that can stabilize a position-controlled humanoid robot when standing still or walking on synthetic grass even when subjected to external disturbances. Two types of controllers are designed and implemented: ankle strategy and stepping strategy. The robot's joints consist of position-controlled servos which can be complicated to model analytically due to nonlinearities and non-measurable parameters, hence the dynamic model of the humanoid robot is acquired using a non-recursive least squares system identification. This model is also used to design a Kalman Filter to estimate the system states from noisy inertial measurement unit (IMU) sensor and design a linear quadratic regulator (LQR) controller. To handle the nonlinearities, the LQR controller is extended with fuzzy logic algorithm that changes the LQR gain value based on angle and angular velocity membership functions. The proposed control system can maintain the humanoid robot's stability around the pitch axis when subject to pendulum disturbances or even restraining force from a spring balance.
翻译:本文旨在建立一个控制器,能够在处于静止状态或即使在受到外部干扰的情况下在合成草地上行走时稳定定位控制的人类机器人。 设计并实施了两种类型的控制器: 脚踝战略和脚步战略。 机器人的连接器由位置控制的服务器组成,由于非线性和非可测量参数,这些服务器在分析上可能变得复杂,可以进行模型模型分析,因此人类机器人的动态模型是使用非递归性最小方形系统识别方法获得的。 这个模型还用来设计一个卡尔曼过滤器,用噪音惯性惯性测量器(IMU)传感器来估计系统状态, 并设计一个线性二次二次调节器(LQR)控制器。 要处理非线性, LQR 控制器将使用模糊逻辑算法扩展, 以改变LQR 获得值, 以角度和角速度成员功能为基础。 拟议的控制系统可以在受到硬质扰动甚至从弹簧平衡中抑制力时, 将人类机器人的稳定性维持在倾轴上。