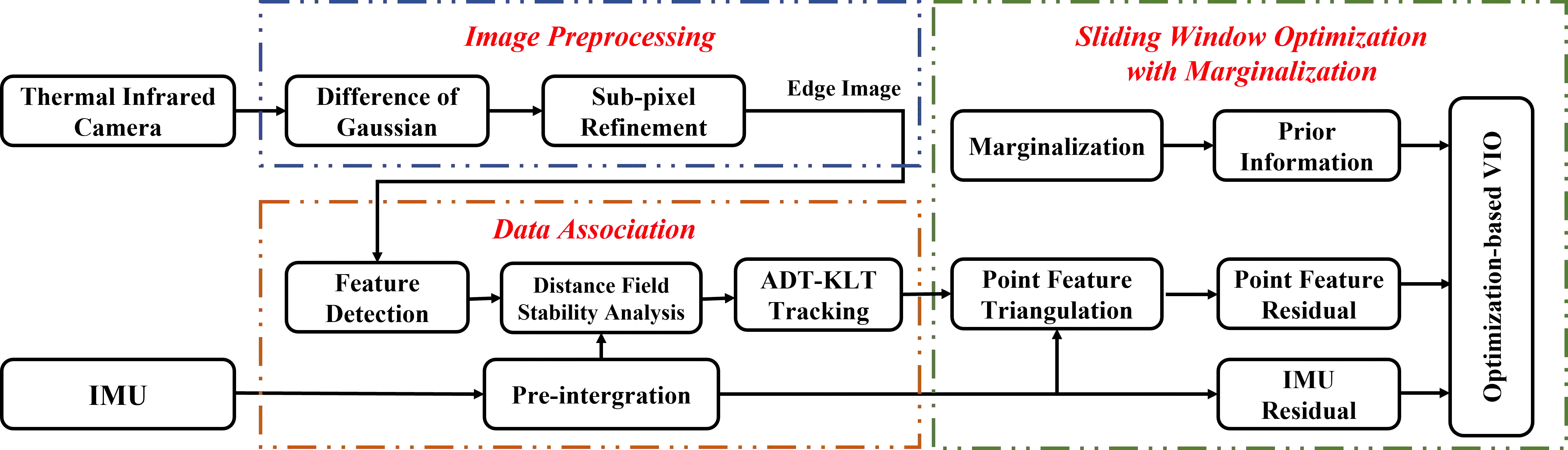
State estimation in complex illumination environments based on conventional visual-inertial odometry is a challenging task due to the severe visual degradation of the visual camera. The thermal infrared camera is capable of all-day time and is less affected by illumination variation. However, most existing visual data association algorithms are incompatible because the thermal infrared data contains large noise and low contrast. Motivated by the phenomenon that thermal radiation varies most significantly at the edges of objects, the study proposes an ETIO, which is the first edge-based monocular thermal-inertial odometry for robust localization in visually degraded environments. Instead of the raw image, we utilize the binarized image from edge extraction for pose estimation to overcome the poor thermal infrared image quality. Then, an adaptive feature tracking strategy ADT-KLT is developed for robust data association based on limited edge information and its distance distribution. Finally, a pose graph optimization performs real-time estimation over a sliding window of recent states by combining IMU pre-integration with reprojection error of all edge feature observations. We evaluated the performance of the proposed system on public datasets and real-world experiments and compared it against state-of-the-art methods. The proposed ETIO was verified with the ability to enable accurate and robust localization all-day time.
翻译:在基于常规视觉-内皮奥氏测量法的复杂光化环境中,根据常规视觉-内分泌测量法进行国家估计是一项艰巨的任务,因为视觉相机的视觉严重退化。热红外线照相机能够全天时间,受照明变化的影响较小。然而,大多数现有的视觉数据关联算法是不兼容的,因为热红外线数据包含巨大的噪音和低差异。受热辐射在物体边缘差异最大的现象的驱使,该研究提出一个ETIO,这是在视觉退化环境中进行稳健定位的第一个边缘基础单眼单眼热内分泌测量法。我们用边缘提取的双向图像来估计外观,以克服低的热红外图像质量。随后,根据有限的边缘信息及其远距离分布,制定了适应性特征跟踪战略ADT-KLT。最后,通过将IMU与所有边缘地貌观测的重新预测错误结合起来,对近期的滑动窗口进行实时估计。我们评估了拟议中的公共数据集和现实-世界级图像图像的性图象学表现,并对照了所有准确性地球同步化的方法。