

项目名称: 基于显著性和信任传递的动态场景主题发现
项目编号: No.61272258
项目类型: 面上项目
立项/批准年度: 2013
项目学科: 自动化技术、计算机技术
项目作者: 刘纯平
作者单位: 苏州大学
项目金额: 81万元
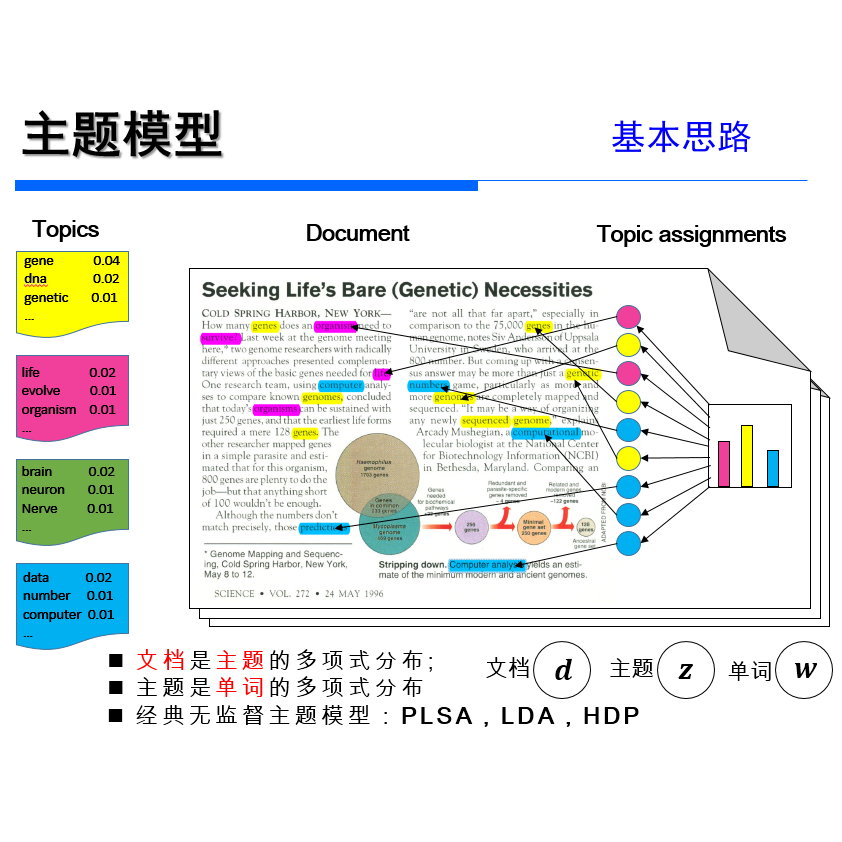
中文摘要: 动态场景因运动复杂、多变,研究其内容和语义提取对理解场景有非常重要的意义。 本项目针对海量信息快速抽取、低层特征和高层语义之间存在鸿沟等问题,在视觉注意和选择性的基础上,结合主题模型和信任传递机制,提出基于显著性和信任传递的动态场景主题发现机理。 研究内容及创新点:1)具有预测性的混合时空显著计算模型。提出基于信任传递和贝叶斯网络的混合时空显著模型,并利用本征维和流失量信息预测后续显著位置;2)场景社会关系学习。提出以场景片段中显著对象出现和共现关系建立社会关系网络结构,发现场景重要显著位置;3)动态场景主题发现。提出空间信任传递主题模型及动态信任传递关系主题模型分别学习单帧和场景的语义可视层次结构,建立动态场景的总的语义可视层次结构,完成场景故事层面的分割。
中文关键词: 动态场景;显著性检测;主题模型;深度学习;语义分析
英文摘要: Natural scenes are usually composed of several dynamic entities. Foreground objects often move amid complicated backgrounds that are themselves moving, e.g., swaying trees or other objects such as a crowd, a flock of birds, moving water, wave's snow, rain, and smoked-filled environments. Even for static scenes, egomotion of the imaging sensor can cause a highly variable background. In the most extreme situations, egomotion and scene motion combine to produce very complex motion patterns. We refer to scenes with any of these types of variability as dynamic scenes. Because both spatial and temporal dependencies between moving objects are relevant, so study of the extraction algorithm of content and semantic in dynamic scenes is critical significant to scene understanding. Human visual system has a remarkable ability to quickly grasp salient regions in static and dynamic scenes. Efficient belief propagation of early vision, generative models and the Bayesian brain hypothesis provide a framework that can quantitatively model interaction and inference between prior knowledge and sensory evidence to represent the physical and statistical properties of the environment. In this work, we address dynamic scene understanding and want to automatically answer questions such as: What are the typical objects in the scene? Ho
英文关键词: Dynamic Scene;visual saliency detection;topic model;deep learning;semantic analysis
成为VIP会员查看完整内容
相关内容
专知会员服务
8+阅读 · 2022年3月12日
Arxiv
0+阅读 · 2022年4月18日
Arxiv
36+阅读 · 2021年5月27日

相关VIP内容
专知会员服务
8+阅读 · 2022年3月12日
相关资讯
相关论文
Arxiv
0+阅读 · 2022年4月18日
Arxiv
36+阅读 · 2021年5月27日