【开放书】《行为与认知机器人学》,241页pdf
这本书描述了如何创建能够自主执行任务的行为和认知技的机器人,而他们与环境互动,通过进化和/或学习过程。本书专注于无模型的方法,以最少的人为干预,机器人使用的行为解决了它的任务,这种行为产生的方式是由自适应过程自动发现的,即它不是由实验者指定的。
https://bacrobotics.com/
这本书的第一个目标是介绍自主机器人和自适应方法:进化机器人,强化学习,和通过演示学习。在这方面,本书不能也不打算详尽无遗。它侧重于当前最有效的方法,以及那些密切相关但通常在独立的研究团体中独立研究的方法之间的关系。
第二个目标是通过对自适应机器人在具体实验中发现的行为和认知解决方案的分析来说明具身智能的基本方面:机器人的身体和“大脑”之间的关系,感觉运动协调的作用,欠驱动的后果,行为的动力和多层次的含义,鲁棒性的重要性,出现和自组织的作用,学习经验对适应过程的影响,预测和世界模型的作用,机器人之间的合作和竞争的作用,能够促进持续和开放学习的因素。
最后,第三个目标是让读者通过实验自适应机器人来获得实际知识。这个最终目标是通过向读者介绍易于使用和强大的软件工具来实现的,允许创建自适应机器人,复制代表性的最先进的实验,并获得在这个领域进行高质量研究所需的实践技能。
Preface
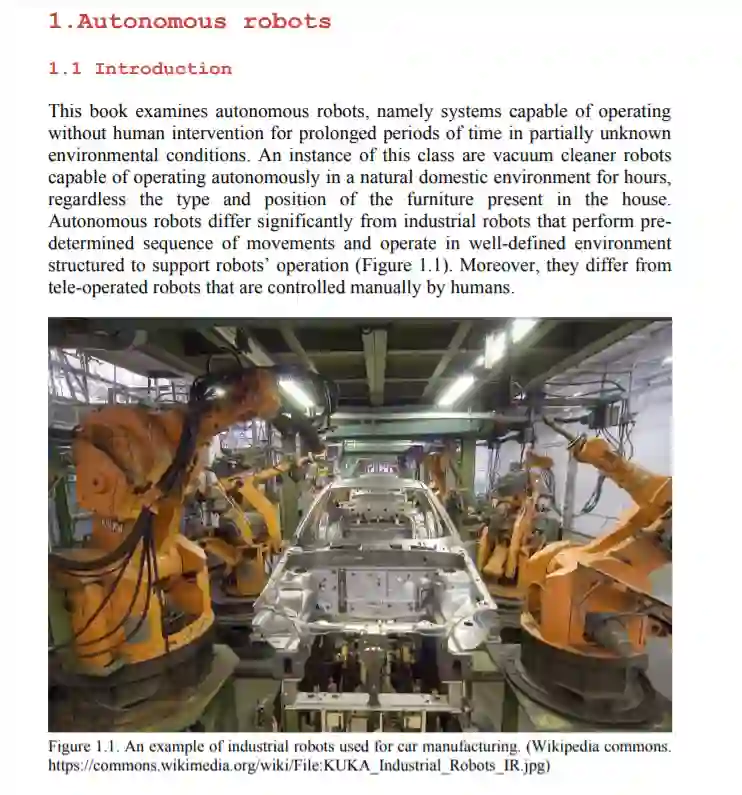
1. Autonomous Robots
2. From Braitenberg's Vehicles To Neuro-Robots
3. Embodiment
4. Situatedness
5. Behavior And Cognition As Complex Dynamical Systems
6. Adaptation
7. Robustness, Plasticity and Antifragility
8. Swarm Robotics
9. Communication and Language
10. Neural Basis of Cognition
11. Cognition
12. Long-Term and Open-Ended Learning
13. How to Train Robots Through Evolutionary And Reinforcement Learning Algorithms
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“BCR” 就可以获取《《行为与认知机器人学》,241页pdf》专知下载链接



登录查看更多
相关内容

Arxiv
0+阅读 · 2021年6月23日
A Survey of Reinforcement Learning Techniques: Strategies, Recent Development, and Future Directions
Arxiv
80+阅读 · 2020年1月19日


相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2021年6月23日
A Survey of Reinforcement Learning Techniques: Strategies, Recent Development, and Future Directions
Arxiv
80+阅读 · 2020年1月19日