韦布望远镜睁眼看到第一缕星光,镜面校准进行时
行早 发自 凹非寺
量子位 | 公众号 QbitAI
恒星编号:HD84406,距离:258.5光年,位置:大熊座。
这就是韦布太空望远镜看到的第一颗恒星。
在达到目标位置不到两周,韦布望远镜的调试和校准就已经初见成效:
望远镜上的近红外相机首次捕捉到了第一缕星光,并且和模拟实验符合得很好:
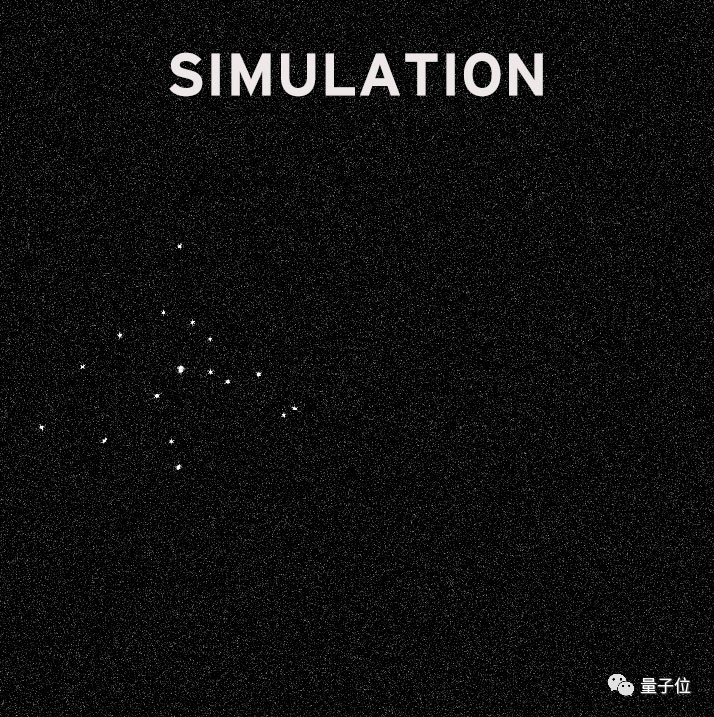
这第一缕星光就是由18个未对齐的镜片拍到的18个光点的合集,它们都是HD84406的图像。
而韦布望远镜接下来的任务就是把这些散落的点化零为整。
这话说起来很简单,但是实际上异常艰难,并且需要极高的精度:让18个镜片在光波长量级上相互配合,范围只有50nm。
打个比方来说,如果整面主镜的面积和美国一样大,那么要把18个镜子校准到高度差不超过3.8cm。
这得什么样的微操才能做到?我们来看看韦布望远镜调试的全过程。
调试七步
在接下来的三个月内,韦布望远镜会经历七个调试步骤,分别为:各部图像识别、各部对齐、图像集中、粗略相位调整、精细相位调整、其他仪器对准、最终校正。
这些步骤可以按功能分为三类:图像对齐、相位对齐、最终校正。
其中图像对齐,简单来说就是是将分立的18片镜子“拧成一股绳”,而不是像刚才看到的图像那样,每个镜片还是自顾自地拍照。
为了合众为一,韦布望远镜需要凭借自身高精度的镜面校准能力来对齐主镜,每次移动的距离可以精确到一根头发丝直径的万分之一。
从镜面的角度来看,理想的效果是这样的:18个镜片逐渐组成一个完整的凹面镜,把光线都汇聚到一点上。

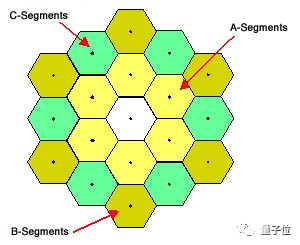
而从图像的角度来看是这样的:
镜面各部分的调整会按照A(黄色)-B(绿色)-C(青色)的顺序将图像都汇聚到一起。
但是只有这些还是不够的,图像对齐之后,这18个镜子还需要对相位进行三轮粗调试和细调试。
这个阶段的调试总的来说就是将难以观测的误差转化为其他易于观测的形式。
例如相位的粗调试就是把不同镜面的错位距离转化为下图中栅格的倾角,以便判断误差。
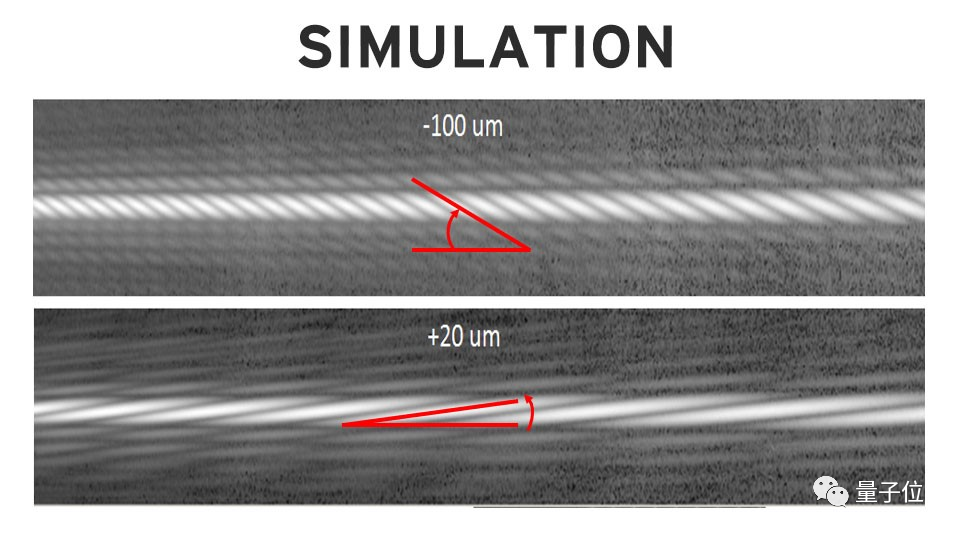
像上图中的上排照片,模拟的就是两片镜面高度上相差了-100um的情况。
而当栅格朝另一个方向倾斜到一定角度时,代表两片镜面高度上相差了+20um。
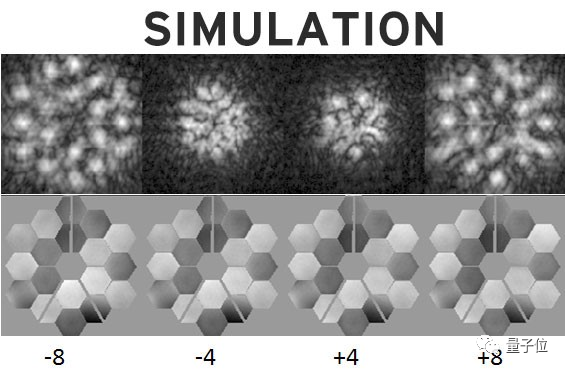
在每轮相位粗调试之后,韦布望远镜还会利用内置的特殊光学元件对镜面进行细调试。
这次是把误差转化为图像的明暗来判断。
这个步骤首先通过引入一些散焦量把图像模糊掉(下图上排),然后观察镜面的明暗情况(下图下排)。
那些非常亮或者非常暗的镜面就是需要较大调整的地方。
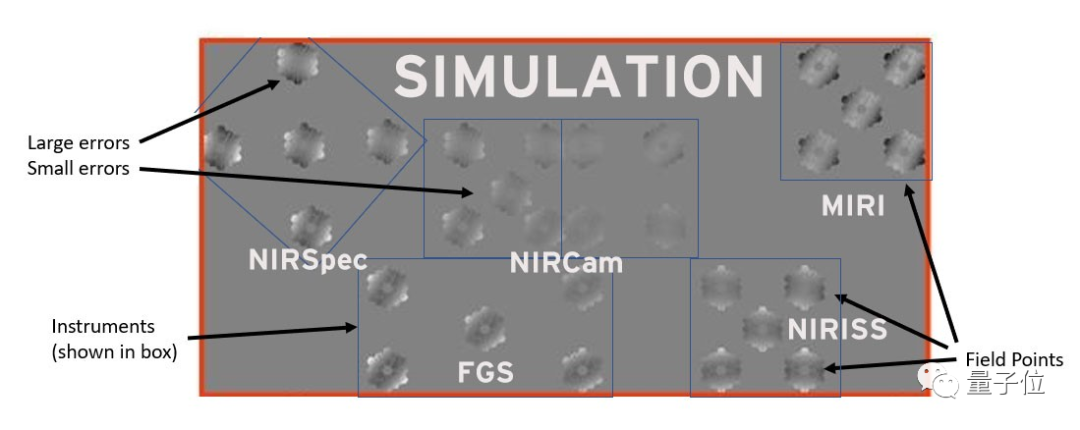
最后,韦布望远镜中的其他仪器也需要根据近红外相机对准的位置进行调试。
每种仪器还会在多个地方不同场点测量误差,也是利用明暗的不同来判断误差的大小:
在所有的步骤都完成之后,韦布望远镜还需要视情况重复进行上述的某个步骤,直到主镜中的所有残留的误差都清除殆尽。
因此,在这个阶段,韦布望远镜拍出的照片可能并不如你之前看到的图片那样漂亮。
但是,等到今年夏天,所有校准和调试都完成之后,它拍摄的第一张照片一定值得期待。
参考链接:
[1]https://blogs.nasa.gov/webb/2022/02/03/photons-incoming-webb-team-begins-aligning-the-telescope/
[2]https://www.youtube.com/watch?v=_2zQiWeXTg4&t=3s
— 完 —
「智能汽车」交流群招募中!
欢迎关注智能汽车、自动驾驶的小伙伴们加入社群,与行业大咖交流、切磋,不错过智能汽车行业发展&技术进展。
ps.加好友请务必备注您的姓名-公司-职位哦~

点这里👇关注我,记得标星哦~
一键三连「分享」、「点赞」和「在看」
科技前沿进展日日相见~





