30天150万公里,韦布望远镜抵达终点成功入轨,18镜合一进行时
行早 晓查 发自 凹非寺
量子位 | 公众号 QbitAI
经过了30天的旅程,在航行了146万公里之后,全球第一“鸽王”、耗资100亿美元的韦布望远镜终于到达了目的地:日地第二拉格朗日点L2。

这台耗费巨资的太空望远镜,经历了各种艰险,终于平安抵达目的地,广大天文爱好者心里的石头终于落地了。
最激动的恐怕当属NASA局长,他在官方声明中祝贺韦布:“欢迎到家”。
网友们也是等不及要看韦布拍下的第一张照片了:

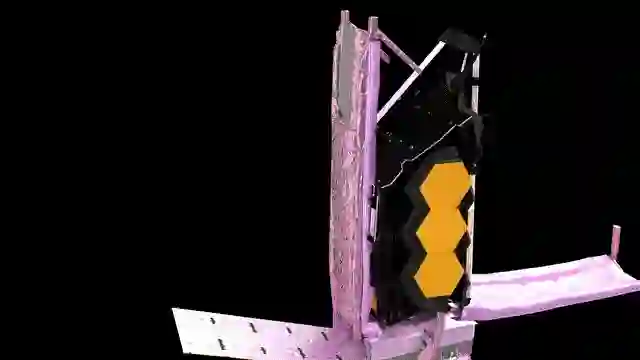
这一路上,韦布需要先部署遮阳板、太阳能电池以及18面镜子,每一步都必须精确无误,毕竟它没有任何修补的机会。
![]()
△图注:韦布望远镜展开关键的遮阳板
当然,韦布望远镜“跋山涉水”跑了这么远,也不是白跑的。这个最终的安家位置里头门道不少。
第二拉格朗日点真有讲究
韦布望远镜目的地L2拉格朗日点有什么讲究?
在航天领域,L2是一个极为特殊的地点,航天器在这一点受到地球和太阳引力之和刚刚好,能让它和地球同步绕太阳公转。
这样韦布就是一直伴随着地球,随时向地球传送信号了。
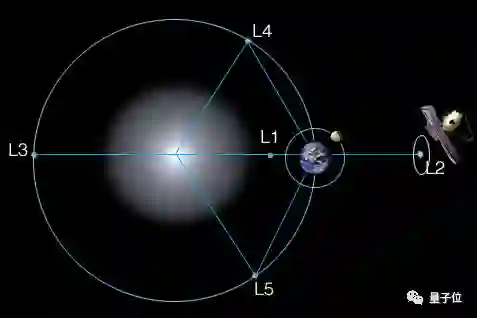
其次,稳定在L2点的韦布能始终保持太阳、地球、月球在其同一侧。
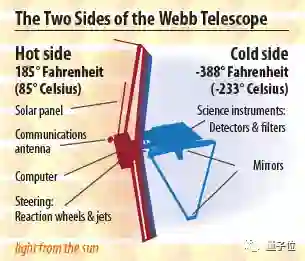
因为韦布望远镜的任务是探测遥远物体的红外信号,而任何物体都会发出红外线,包括太阳、地球、月亮等等。
为了屏蔽这些热源的干扰,最好让这些天体都位于韦布的同一侧。
然后再用多层由反射材料Kapton组成的遮阳板保护,让它尽可能地反射来自其他热源的干扰。
这样一来,即使向阳面(下图左侧)达到85摄氏度,望远镜(下图右侧)也能在零下233度的环境下正常运行。
这么看来,L2点确实是韦布的理想选择。
不过,有一点和理想情况有些出入,那就是如今韦布的位置并不是精确的L2点,而是在附近“徘徊”。
根据物理学的推算,L2点只是一个不稳定点。具体原因请看下图:
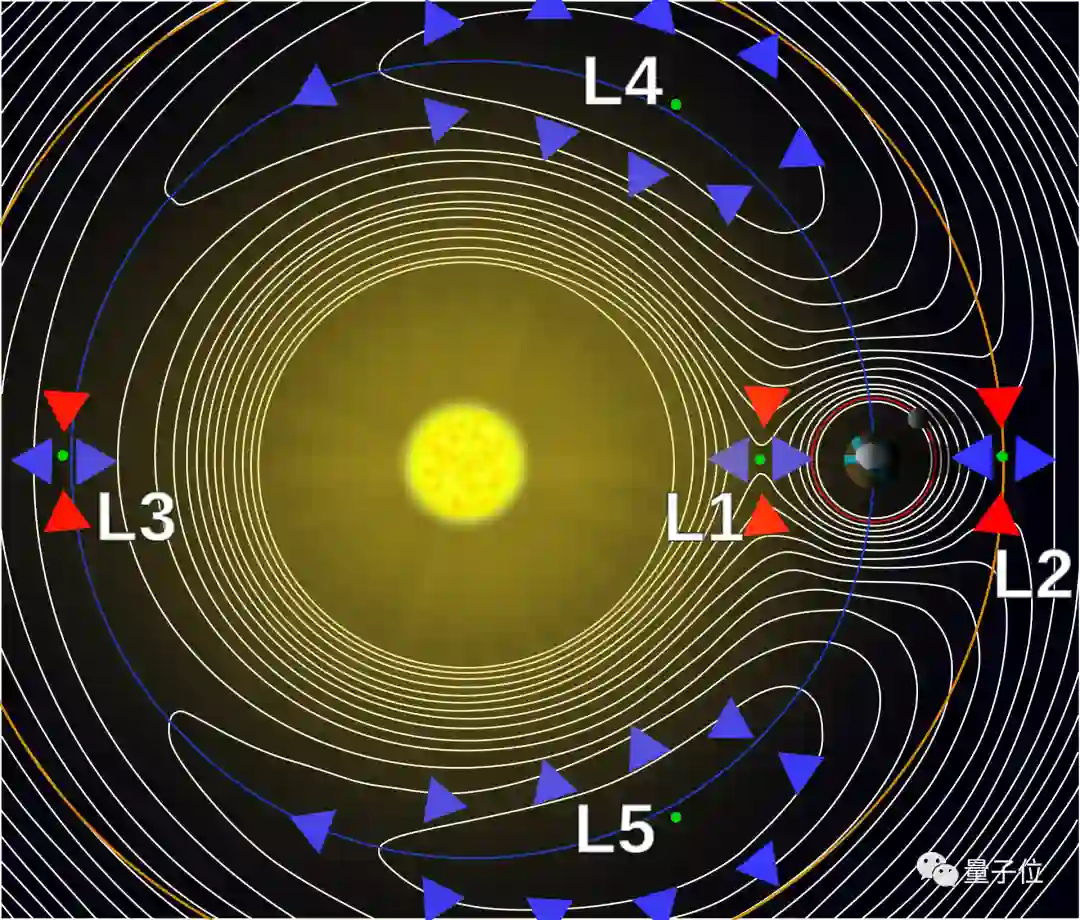
图中箭头表示引力场中的受力方向,如果韦布在日地连线方向上受到了微小的扰动,就会离L2越来越远。
所以韦布需要携带燃料随时修正位置。
因此韦布所在的轨道实际是一个绕L2点的椭圆轨道:

而这样的轨道运动需要消耗一定的燃料来维持,因此韦布望远镜的寿命是有限的。
第一张照片今夏拍摄
在抵达目的地之后,接下来的三个月韦布需要进行一些初始的光学检查和望远镜校准。
首先,韦布会利用精细导航传感器,先将望远镜指向一个明亮的恒星,来演示锁定目标的能力,并使用NIRcam(近红外相机)来获取数据。
但是目前主镜的18个镜片尚未对齐,所以目标恒星的照片还是18个分立的扭曲图像,后续的
对齐和校准还会持续到4月。
在发射后第五、第六个月,韦布将完成所有仪器的校准和调试,还会先拿我们太阳系中的小行星、彗星、卫星等目标小试牛刀,来展示它的移动跟踪能力。
这些早期观测都会在调试结束后立即发布。
而半年之后,韦布会正式开始执行科学任务。
就在今年夏天,我们可以一起期待最强的空间望远镜韦布传回的第一张图片了。
参考链接:
[1]https://www.npr.org/2022/01/24/1075437484/james-webb-telescope-final-destination
[2]https://jwst.nasa.gov/content/about/orbit.html
— 完 —
「智能汽车」交流群招募中!
欢迎关注智能汽车、自动驾驶的小伙伴们加入社群,与行业大咖交流、切磋,不错过智能汽车行业发展&技术进展。
ps.加好友请务必备注您的姓名-公司-职位哦~

点这里👇关注我,记得标星哦~
一键三连「分享」、「点赞」和「在看」
科技前沿进展日日相见~



