明明水是无色的,为什么水下拍到的图却大多是蓝绿色的背景?
来源丨中科院之声(ID:zkyzswx)
作者丨向文鼎
先来讲一个笑话:
你知道海为什么是蓝色的么?
因为海里有鱼,鱼会吐泡泡,Blue Blue Blue……

好吧,这个笑话有点冷。但今天我们就来聊聊关于水下颜色这个话题。
我们知道,水明明是无色的,但是水下拍摄的图像往往都是背景为蓝色或者绿色的,这是为什么呢?
其实,这主要与水下的光学成像模型有关,光线照射景物反射后到达人的眼睛呈现出景物本身的样子。
我们在陆地上看到景物,这个过程中光线经过的介质是空气。但是当在进行水下拍摄时,光线传输的介质变成了水。景物经过水下介质到达人眼或者其他传感器时,物体基本失去了“彩色”这一属性,大部分图像的背景都呈现蓝绿色,仿佛都蒙上了厚厚的蓝绿色“滤镜”,如图 1 所示。

图1 水下图像
那水里究竟有什么特殊的东西才导致这一结果呢?下面就让我们来一探究竟。
水下图像出现“偏色”
都是波长惹的祸
我们常常形容颜色为“红橙黄绿青蓝紫”,这句话其实大概描述了人眼的可视电磁波范围。如图 2,从光学的角度来讲,人眼可接收到的可视光谱范围约为380~780nm,红光波长较长,约在700nm左右,波长比红光还长一点的,我们称为红外线;同样,紫光波长约400nm,比紫光波长还短一点的我们称之为紫外线。
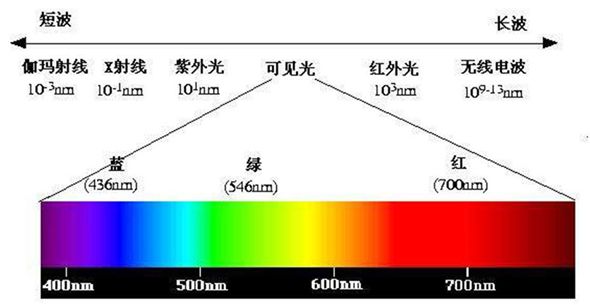
图2 可见光谱
光线在水中的衰减特性与空气中的衰减特性是完全不一样的。从图 3 和图 4 中我们可以看到,在水下环境中,不同波长的光线在水下传播具有不同的衰减率。其中,在可见光范围内,波长较长的红光的穿透能力最弱,到水下3-4米就最先消失了;蓝光具有较短的波长,在水中的传输距离更远;大部分波段的光在水下传播时都会受到强烈的吸收衰减,只有波长在480±30nm波段的蓝绿光在水中的吸收衰减系数最小,穿透能力最强,故常称该波段为“水下窗口”。
光在水中传播呈指数衰减,导致拍摄的图像对比度低并且具有模糊的表面,这往往就是造成水下成像的颜色失真的“幕后黑手”。在这样的环境中,工作效率是极低的。
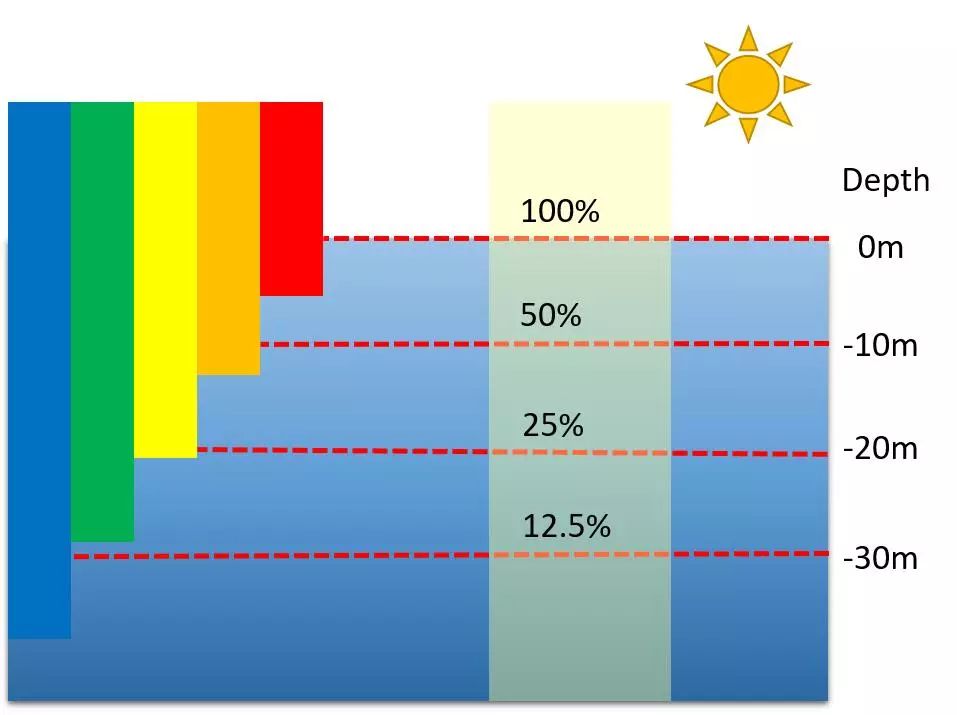
图3 水下光照选择性衰减
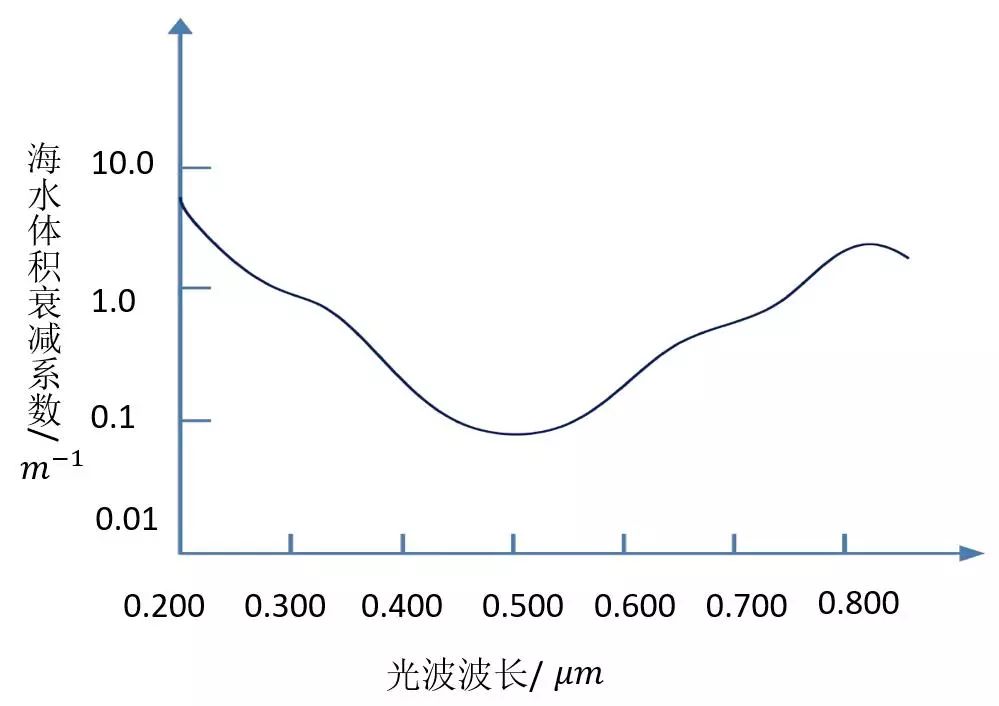
图4 不同波长光线在水下衰减的示意图
另一方面,从相机采集的角度来看,当我们在水下进行作业时,采集的图像往往为数字图像,由 RGB 三原色组成,R代表Red(红色),Green(绿色),Blue(蓝色)。由于红色分量衰减得最严重,于是采集到的图像红色分量基本很少;而蓝绿通道的信息相对保持的较为完整。
从图 5 的 RGB 通道内强度分布图上,我们可以清楚地看到,红色通道内的信息分量基本消失殆尽,蓝绿通道仍保有图像的细节,这也导致了采集到的图像出现偏色。
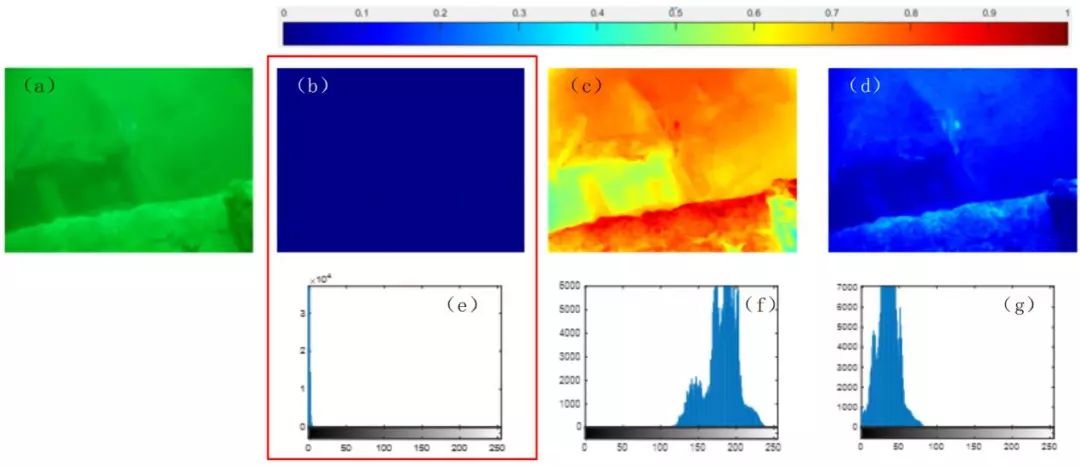
图5 水下图像强度分布:a)水下图像,b)红色通道,c)绿色通道,d)蓝色通道,e)红色通道强度分布,f)绿色通道强度分布,g)蓝色通道强度分布
那么,有没有办法解决水下图像的失真问题呢?
先补偿后增强
修修图还是可以看的
随着海洋开发的需要和不断进步的计算机信息处理技术,通过对成像过程的调控和对退化图像的后续处理,得到清晰完美的水下场景图像已经成为可能。
图像复原算法主要指通过对水下图像的退化过程进行建模,通过估计模型参数,反演退化过程获得清晰的水下图像。经典的水下成像系统的计算机模型是 McGlamery 于 1979 年提出。
如图 6 所示,成像系统所接收到的图像由三部分组成:直接衰减分量、前向散射分量与后向散射分量。其中,直接衰减分量是指在水中未经介质散射,而直接由物体反射回来的光线;前向散射分量是指物体反射的光线经散射衰减后,在较小角度内仍然被传感器采集到的部分;后向散射分量是指除了景物反射的光线以外,环境中的背景光以及由周围物体经散射后的衰减光进入传感器的部分。依靠图像的先验信息和模型参数就可以复原出真实的水下场景。
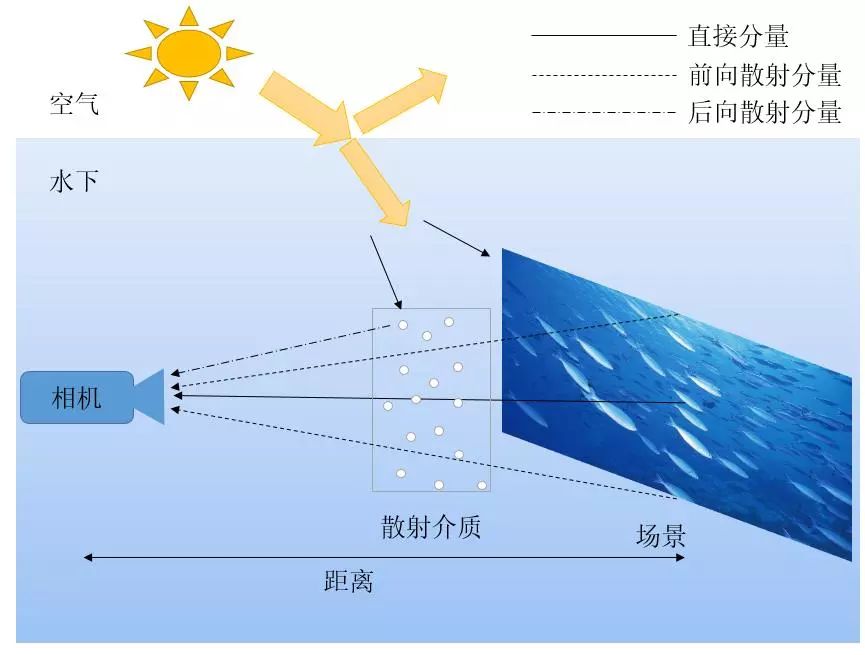
图6 水下图像成像模型
水下图像要复原的内容主要包括两个部分:补偿+增强。首先,根据不同波长光线的衰减特性,对退化较严重的通道进行补偿,修正图像色度;其次,在色度调整的基础上增强图像,提升图像的对比度,使图像拥有更加醒目的视觉效果,更加明显的图像细节。
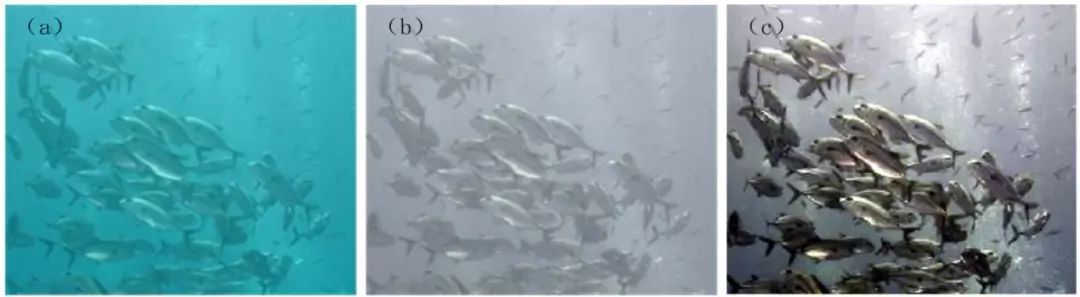
图7 水下图像复原:a)水下图像,b)色度调整,(c)对比度提升
水下图像复原的流程如图 7 所示,这些背景为蓝绿色的图像经过复原以后,视觉效果是不是更好了呢?以后再也别说什么蓝色让人“忧郁”啦。
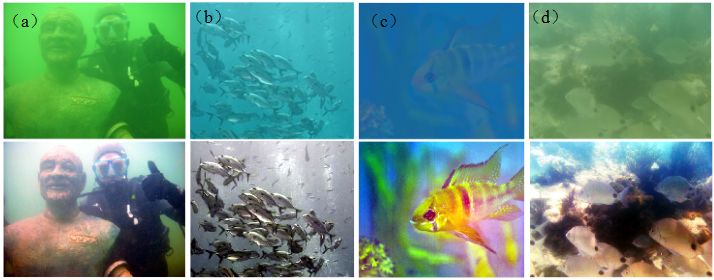
图8 水下图像复原
退化的水下图像难以直接应用于海洋军事、海洋环境保护和海洋工程,给实际操作和科研带来了很大的困难。如今,越来越多的水下机器人已投入使用,图像处理信息的能力是水下机器人对环境动态感知、快速定位与跟踪视觉目标的关键。搭载图像复原技术的水下机器人可以直接应用于水下观测,在海洋工程的上有广泛的应用前景。
来源:中国科学院光电技术研究所
果壳
ID:Guokr42
整天不知道在科普些啥玩意儿的果壳
我觉得你应该关注一下

喜欢记得点个“在看”哟↘️



