谷歌发布离线强化学习新范式,克服RL智能体只能在线训练难题,训练集相当于200多个ImageNet
深度强化学习实验室报道
转载自: 机器之心
作者:Rishabh Agarwal等
编辑:DeepRL
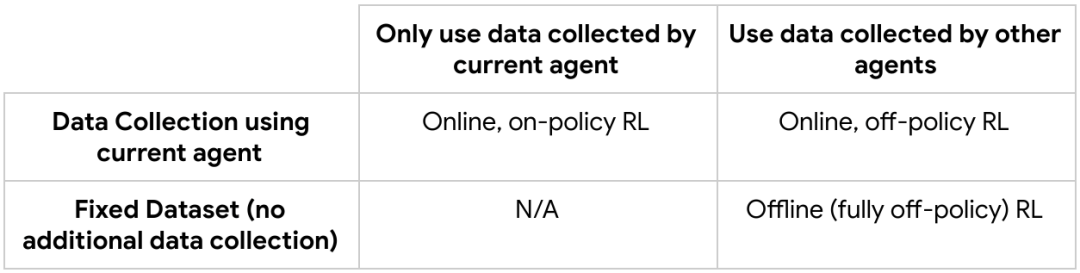
为了避免 distribution mismatch,强化学习的训练一定要在线与环境进行交互吗?谷歌的这项最新研究从优化角度,为我们提供了离线强化学习研究新思路,即鲁棒的 RL 算法在足够大且多样化的离线数据集中训练可产生高质量的行为。该论文的训练数据集与代码均已开源。机器之心友情提示,训练数据集共包含 60 个雅达利游戏环境,谷歌宣称其大小约为 ImageNet 的 60 x 3.5 倍。
论文链接:https://arxiv.org/pdf/1907.04543.pdf
项目地址:https://github.com/google-research/batch_rl
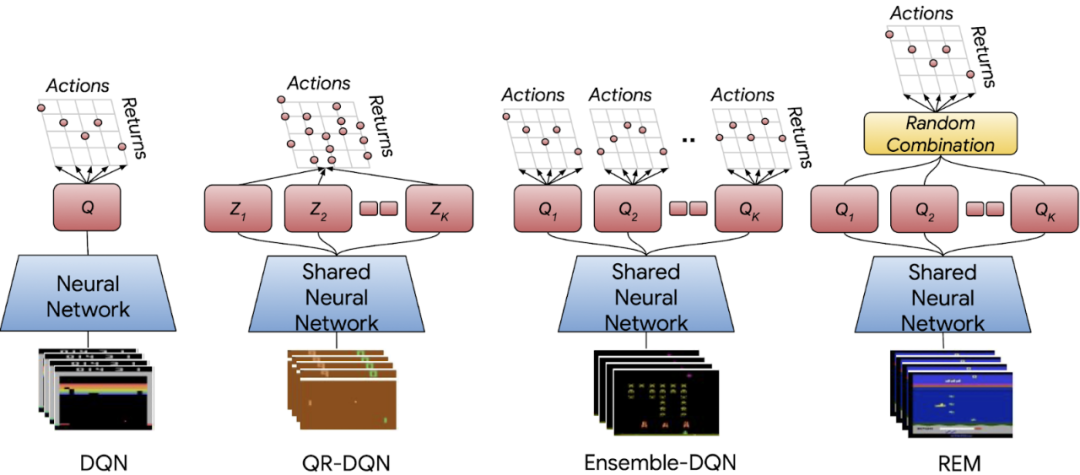
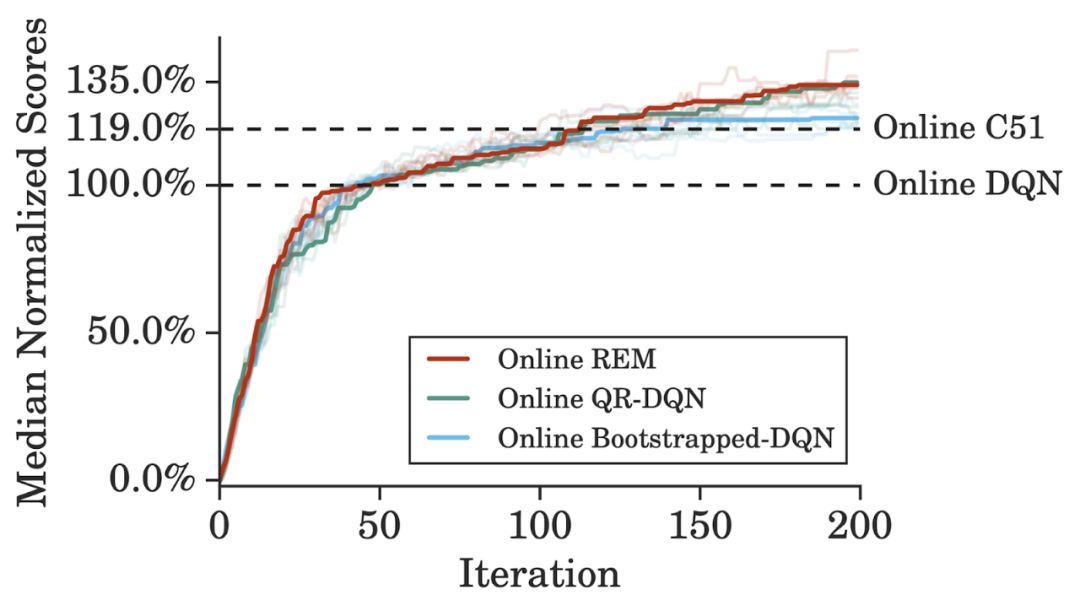
集成 DQN 是 DQN 的一个简单扩展,它训练多个 Q 值估计并取平均值来进行评估;
随机集成混合(Random Ensemble Mixture,REM)是一个易于实现的 DQN 扩展,它受到了 Dropout 的启发。REM 的核心理念是,如果可以得到 Q 值的多个估计,则 Q 值估计的加权组合(weighted combination)也成为 Q 值的一个估计。因此,REM 在每次迭代中随机组合多个 Q 值估计,并将这种随机组合用于鲁棒训练。
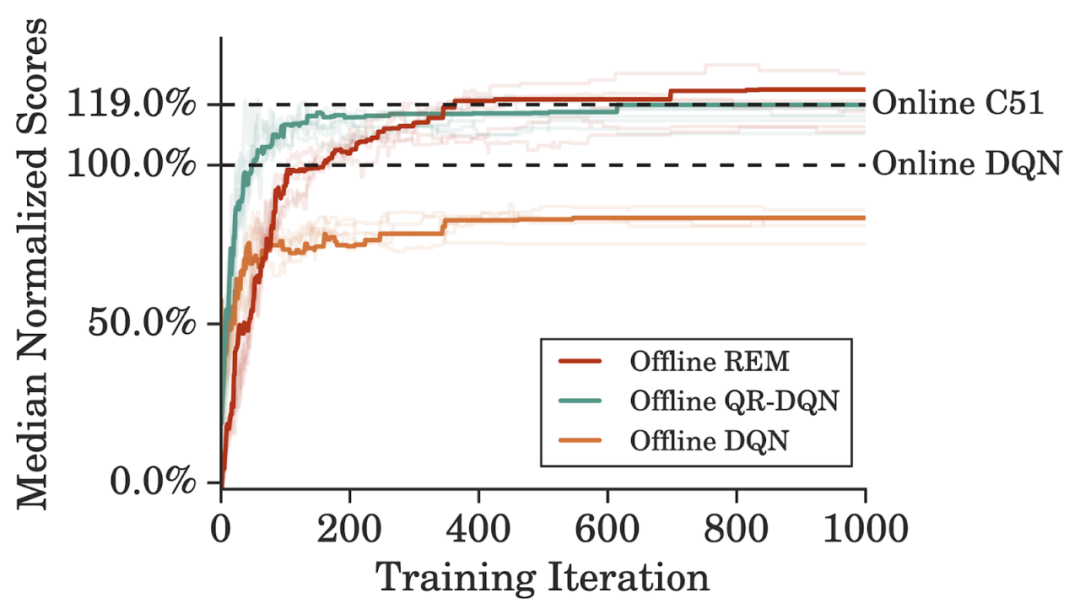
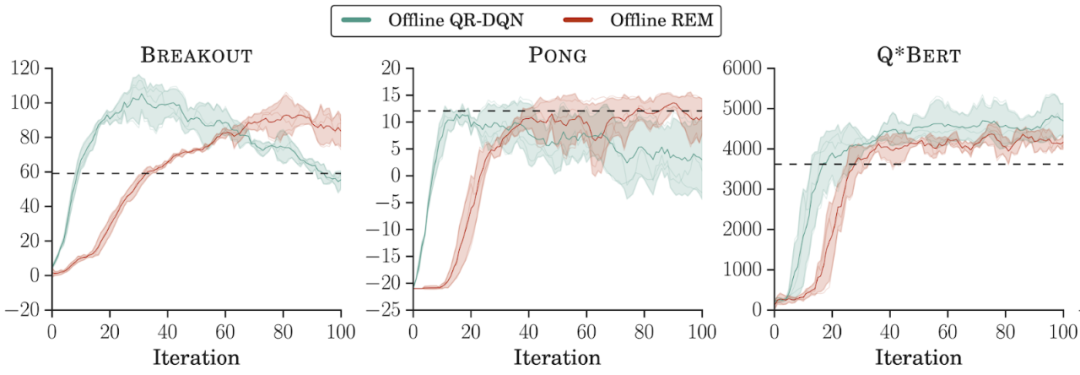
离线数据集大小。谷歌训练离线 QR-DQN 和 REM 所用的数据集是通过随机下采样整个 DQN 回溯数据集得到的简化数据,同时保持了相同的数据分布。与监督学习类似,模型性能随着数据集大小的增加而提升。REM 和 QR-DQN 只用整个数据集的 10% 就达到了与完全的 DQN 接近的性能;
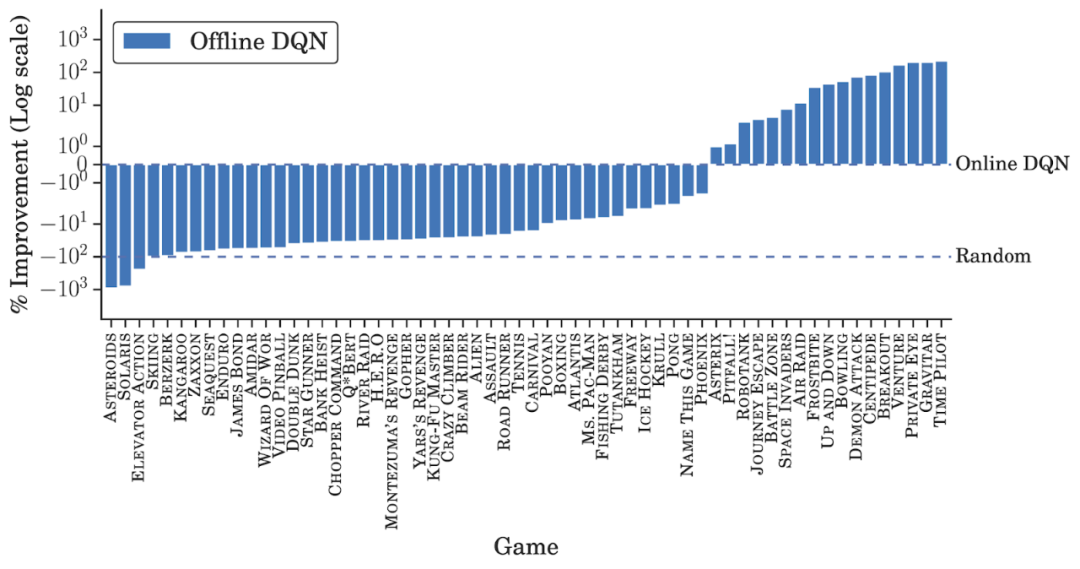
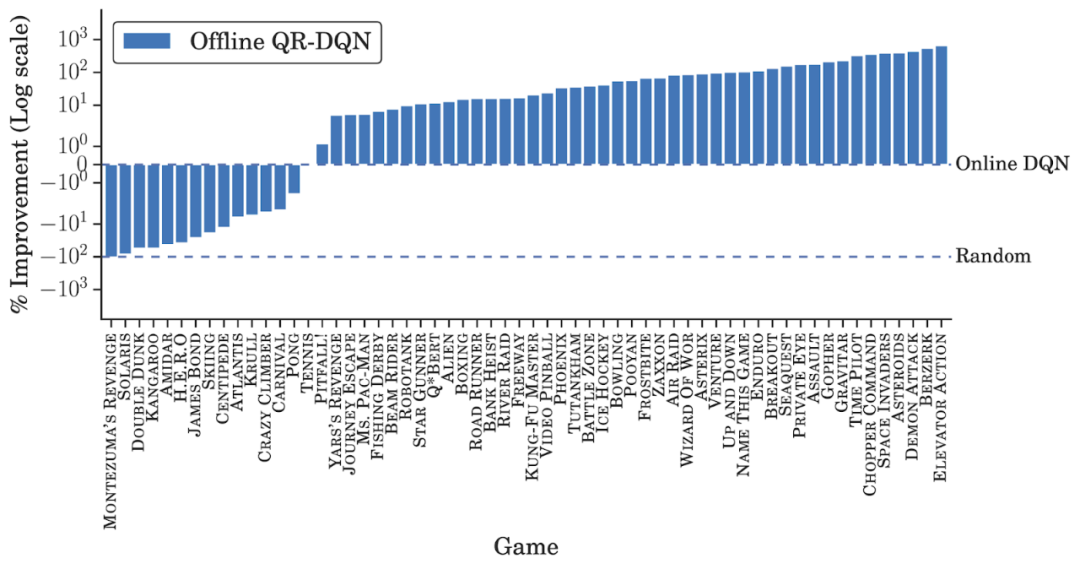
离线数据集的组成。研究者在 DQN 回溯数据集每个游戏的前 2000 万帧上训练了离线强化学习智能体。离线 REM 和 QR-DQN 在这个低质量数据集上的表现优于最佳策略(best policy),这表明如果数据集足够多样,标准强化学习智能体也能在离线设置下表现良好;
离线算法的选择。有人认为,在离线状态下训练时,标准异策略智能体在连续控制任务中会表现不佳。然而,谷歌研究者发现,最近的连续控制智能体(如 TD3)在大型、多样化离线数据集上训练时,其性能与复杂离线智能体相当。

总结3: 《强化学习导论》代码/习题答案大全
总结6: 万字总结 || 强化学习之路
完
第61篇:David Sliver 亲自讲解AlphaGo、Zero
第59篇:Agent57在所有经典Atari 游戏中吊打人类
第58篇:清华开源「天授」强化学习平台
第57篇:Google发布"强化学习"框架"SEED RL"
第53篇:TRPO/PPO提出者John Schulman谈科研
第52篇:《强化学习》可复现性和稳健性,如何解决?
第51篇:强化学习和最优控制的《十个关键点》
第50篇:微软全球深度强化学习开源项目开放申请
第49篇:DeepMind发布强化学习库 RLax
第48篇:AlphaStar过程详解笔记
第47篇:Exploration-Exploitation难题解决方法
第45篇:DQN系列(1): Double Q-learning
第44篇:科研界最全工具汇总
第42篇:深度强化学习入门到精通资料综述
第41篇:顶会征稿 || ICAPS2020: DeepRL
第40篇:实习生招聘 || 华为诺亚方舟实验室
第39篇:滴滴实习生|| 深度强化学习方向
第37篇:Call For Papers# IJCNN2020-DeepRL
第36篇:复现"深度强化学习"论文的经验之谈
第35篇:α-Rank算法之DeepMind及Huawei改进
第34篇:从Paper到Coding, DRL挑战34类游戏
第31篇:强化学习,路在何方?
第30篇:强化学习的三种范例
第29篇:框架ES-MAML:进化策略的元学习方法
第28篇:138页“策略优化”PPT--Pieter Abbeel
第27篇:迁移学习在强化学习中的应用及最新进展
第26篇:深入理解Hindsight Experience Replay
第25篇:10项【深度强化学习】赛事汇总
第24篇:DRL实验中到底需要多少个随机种子?
第23篇:142页"ICML会议"强化学习笔记
第22篇:通过深度强化学习实现通用量子控制
第21篇:《深度强化学习》面试题汇总
第20篇:《深度强化学习》招聘汇总(13家企业)
第19篇:解决反馈稀疏问题之HER原理与代码实现
第17篇:AI Paper | 几个实用工具推荐
第16篇:AI领域:如何做优秀研究并写高水平论文?
第14期论文: 2020-02-10(8篇)
第13期论文:2020-1-21(共7篇)
第12期论文:2020-1-10(Pieter Abbeel一篇,共6篇)
第11期论文:2019-12-19(3篇,一篇OpennAI)
第10期论文:2019-12-13(8篇)
第9期论文:2019-12-3(3篇)
第8期论文:2019-11-18(5篇)
第7期论文:2019-11-15(6篇)
第6期论文:2019-11-08(2篇)
第5期论文:2019-11-07(5篇,一篇DeepMind发表)
第4期论文:2019-11-05(4篇)
第3期论文:2019-11-04(6篇)
第2期论文:2019-11-03(3篇)
第1期论文:2019-11-02(5篇)




