点击上方“CVer”,选择加"星标"或“置顶”
重磅干货,第一时间送达![]()
近日,计算机视觉顶会 CVPR 2020 接收论文结果公布,从 6656 篇有效投稿中录取了 1470 篇论文,录取率约为 22%。本文介绍了上海交通大学被此顶会接收的一篇论文《PF-Net: Point Fractal Network for 3D Point Cloud Completion》。
![]()
点云补全(Point Cloud Completion)用于修补有所缺失的点云(Point Cloud),从缺失点云出发估计完整点云,从而获得更高质量的点云。点云有助于用较小的数据量描述三维物体,在三维物体的检测识别领域应用广泛。在 PointNet[1] 和 PointNet++[2] 使用深度学习网络实现了点云分割和点云分类之后,点云深度学习逐渐成为热门研究领域。但是,从激光雷达等设备中获取的点云往往有所缺失,这给点云的后续处理带来了一定的困难,也凸显出点云补全作为点云预处理方法的重要性。
传统的点云补完方法基于一定的物体基础结构的先验信息,如对称性信息或语义类信息等,通过一定的先验信息对缺失点云进行修补。这类方法只能处理一些点云缺失率很低、结构特征十分明显的缺失点云。近年来,一些工作也尝试使用深度学习来实现点云补全,如 LGAN-AE[3],PCN[4], 和 3D-Capsule[5] 等,这些工作以不完整点云作为输入,输出完整点云,造成网络过于关注到物体的整体特征而忽略了缺失区域的几何信息。另一方面,这些网络会生成偏向于某类物体共性特征的点云,而失去某个物体的个体特征。
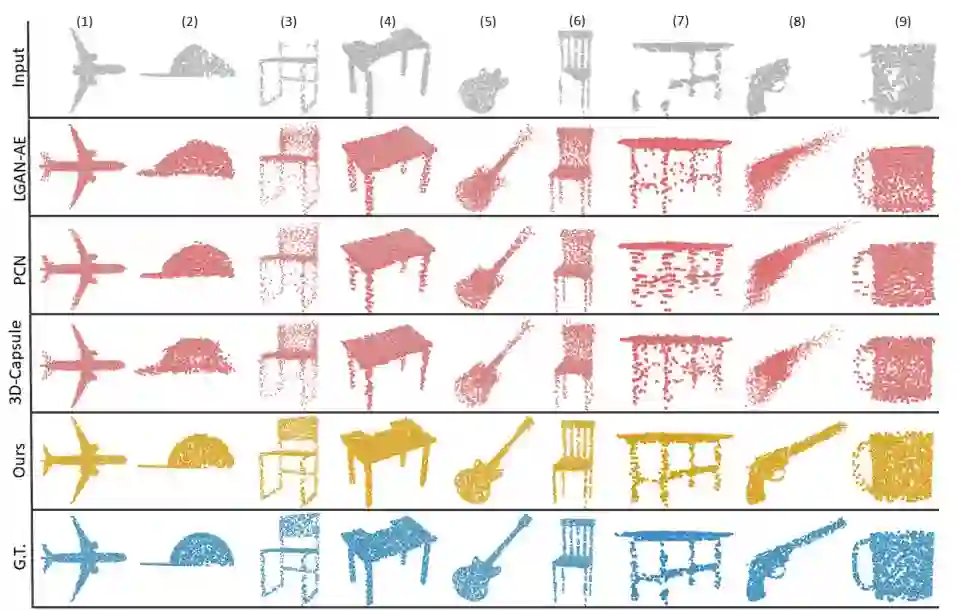
我们提出点云分形网络(PF-Net:Point Fractal Network),采用了类似分形几何的思想,同样以不完整点云作为输入,但是仅输出缺失部分点云,并且较好地保留了某个物体的个体特征。下图 1 中给出了不同点云修补网络的修复效果对比。
![]()
图 1:点云补全效果对比,从上往下(输入; LGAN-AE 输出 [3] , PCN 输出 [4]; 3D-Capsule 输出 [5] ; 我们的 PF-Net 输出; 真实输出)
可以看到,PF-Net 的修补对比其他网络具有以下优势:
(1)保留了输入点云独特的几何特性;(2)细节特征更加丰富且柔和;(3)生成点云整体的质量更高
。
PF-Net 网络之所以可以大幅改善生成点云的效果,与 PF-Net 网络的特征密不可分。该网络的主要特征包括:(1)以不完整点云作为输入,仅输出缺失部分点云,可以更多保留物体点云的空间结构,
对物体的局部特性感知更好
;(2)提出了更优的点云特征提取器:多分辨率编码器(Multi-Resolution Encoder),多尺度的方法提升了高低层次点云语义信息提取的效率;(3)提出了金字塔解码器(Point Pyramid Decoder)用于生成点云,利用多阶段补全损失 (Multi-stage completion loss) 监督其中关键点云的生成,从而减少了几何结构瑕疵。(4)利用 GAN 结构的鉴别器(Descriminator)优化网络,改善了同一类别不同物体间的特征会相互影响的现象(Genus-wise Distortions Problem)。
![]()
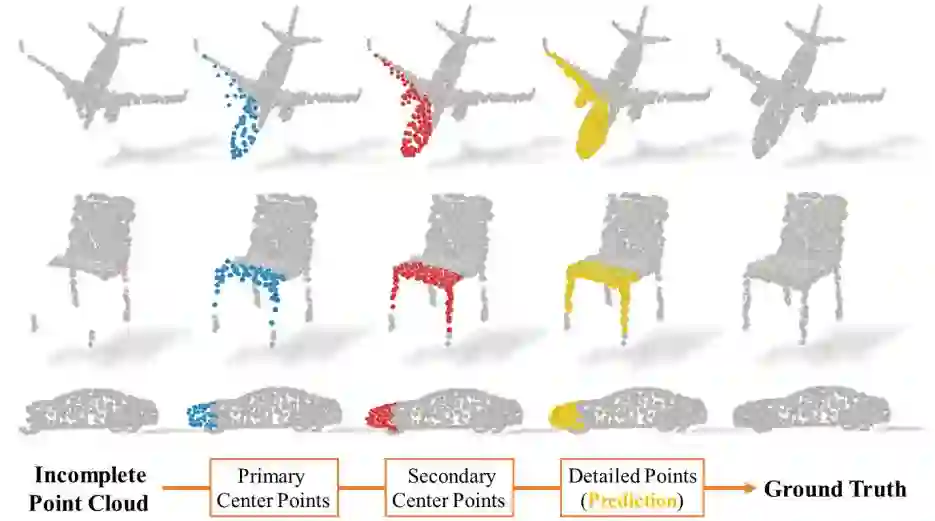
网络的整体网络结果如图 2 所示。PF-Net 网络以多分辨率编码器(MRE)作为特征提取网络,使用联合 MLP(CMLP)替代 MLP 成为单个点云的特征提取器,从而能最大程度保留原始点云的局部特征;利用特征向量通过点云金字塔解码器(PPD)输出点云,PPD 的主要思想是
监督每一阶段的点云,提升关键点的生成质量,在关键点的基础上不断生成新的点云。
下图 3 展示了多层次拟合关键点在不同深度的效果。对比未使用 PPD 结构和损失函数的网络,下表 1 的结果显示了 PPD 结构在 PF-Net 中的重要作用。
![]()
表 1:PF-Net(vanilla)为未使用鉴别器优化的 PF-Net,MR-CMLP 为未使用 PPD 结构的 PF-Net(vanilla)。
![]()
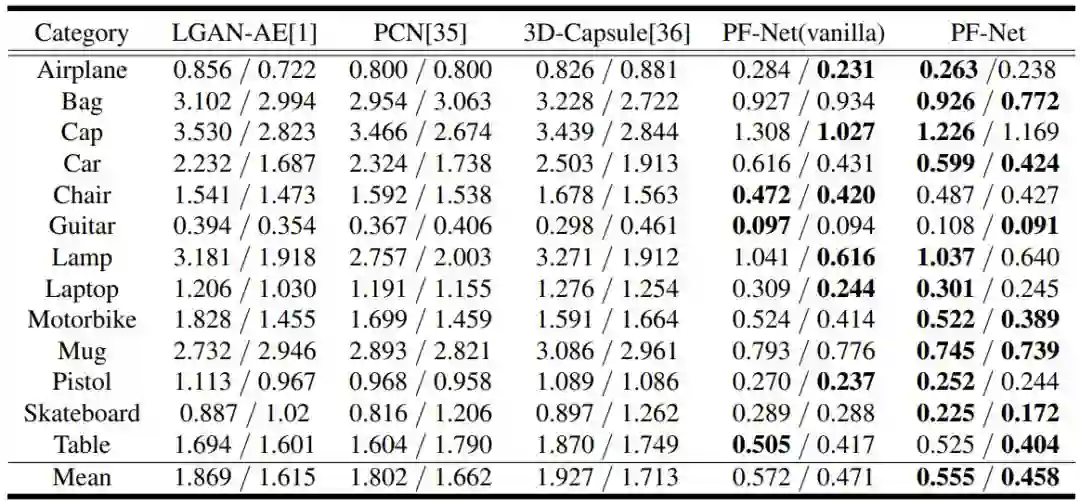
我们主要在 ShapeNet 数据集展开实验,以生成点云和原始点云的相对 Chamfer Distance 指标量为量化指标,下标中「/」左侧为生成点云指向原始点云,「/」右侧为原始点云指向生成点云,可以看到 PF-Net 在 ShapeNet 数据集中的 13 类物体上,在大部分对比中 PF-Net 都是占优的,达到了 SOTA。
![]()
表 2:利用 Chamer distance 为指标的量化指标对比。
PF-Net 网络在不同缺失比例和缺失多个位置的情况下补全效果也十分不错。如下图 4 和图 5 所示。
![]()
图 4:25%,50%,和 75% 的损失比例下的补全结果。
![]()
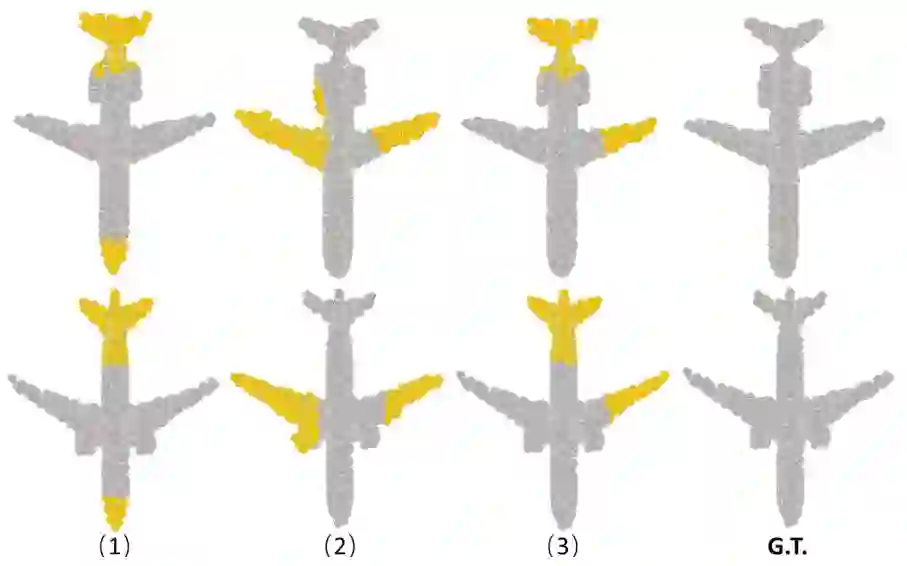
图 5:在飞机机头、机尾、机翼等不同位置、多个位置的补全结果。
总体来说,PF-Net 实现了缺失点云数据下的精细补全,在不同缺失率和多个缺失位置的情况下的补全效果均较好,可以作为点云预处理方法,提高点云分割、点云识别的准确率。然而,目前点云领域并没有类似于 Imagenet 这样庞大的高质量真实数据集,在一定程度上制约了更复杂的点云处理算法的发展。点云数据可以简洁有效地描述三维物体,我们呼吁更多的人关注点云深度学习,共同建设点云深度学习的美好生态。
注:论文前三作者均为上海交通大学机动学院硕士研究生,四作倪枫供职于科技企业,本文通讯作者为上海交通大学讲师乐心怡。
[1] Charles R Qi, Hao Su, Kaichun Mo, and Leonidas J Guibas. Pointnet: Deep learning on point sets for 3D classification and segmentation. CVPR, 2017.
[2] Charles R Qi, Li Yi, Hao Su, and Leonidas J Guibas. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. NeurIPS, 2017.
[3] Panos Achlioptas, Olga Diamanti, Ioannis Mitliagkas, and Leonidas J Guibas. Learning representations and generative models for 3D point clouds. ICML, 2018.
[4] Wentao Yuan, Tejas Khot, David Held, Christoph Mertz, and Martial Hebert. PCN: Point completion network. 3DV, 2018.
[5] Yongheng Zhao, Tolga Birdal, Haowen Deng, and Federico Tombari. 3D point capsule networks. CVPR, 2018.
推荐阅读
2020年AI算法岗求职群来了(含准备攻略、面试经验、内推和学习资料等)
重磅!CVer-学术微信交流群已成立
扫码添加CVer助手,可申请加入CVer大群和细分方向技术群,细分方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流等群。
一定要备注:研究方向+地点+学校/公司+昵称(如目标检测+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群
![]()
▲长按加群
![]()
▲长按关注我们
麻烦给我一个在看!