【CVPR 2022】基于可迁移GNN的自适应轨迹预测
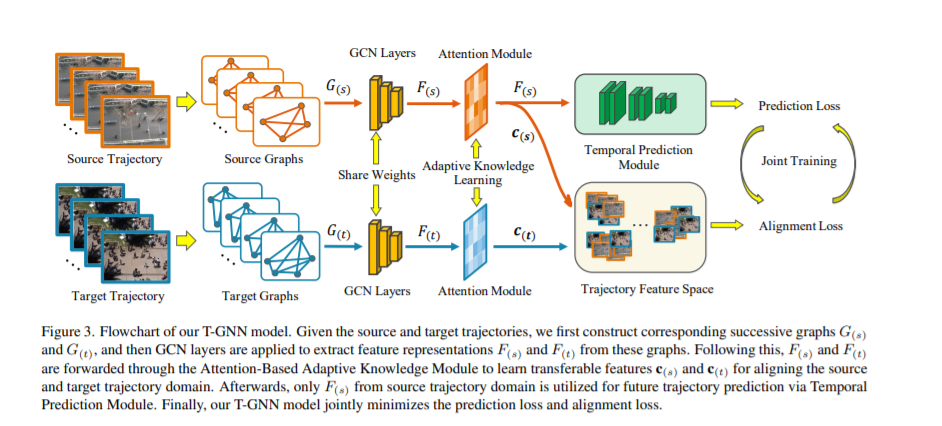
行人轨迹预测是自动驾驶和机器人等广泛的人工智能应用的重要组成部分。现有的方法通常假设训练和测试动作遵循相同的模式,而忽略了潜在的分布差异(如购物中心和街道)。此问题将不可避免地导致性能下降。为了解决这一问题,我们提出了一种新的可迁移图神经网络(T-GNN)框架,该框架在一个统一的框架内联合进行轨迹预测和域对齐。具体地说,我们提出了一个领域不变的GNN来研究结构运动知识,在结构运动知识中减少了领域特定知识。在此基础上,提出了一种基于注意力的自适应知识学习模块,探讨了知识迁移的细粒度个体层面特征表示方法。通过这种方法,可以更好地缓解不同轨迹域之间的差异。我们设计了更具挑战性的实际弹道预测实验,实验结果验证了所提模型的优越性能。据我们所知,我们的工作是填补不同领域中实际行人轨迹预测的基准和技术空白的先锋。
https://www.zhuanzhi.ai/vip/3ee5ceb71259f9f5ddd39b9cdd9e35fe
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“GNNTP” 就可以获取《【CVPR 2022】基于可迁移GNN的自适应轨迹预测》专知下载链接



登录查看更多
相关内容
专知会员服务
47+阅读 · 2022年3月11日
Arxiv
14+阅读 · 2018年3月14日


相关VIP内容
专知会员服务
47+阅读 · 2022年3月11日
相关资讯