【前沿】吉林大学陈虹教授等:智能汽车人机协同控制的研究现状与展望

【导读】智能汽车人机协同控制是指:驾驶员和智能控制系统同时在环, 协同完成驾驶任务, 其目的是通过人机智能的混合增强与协作, 在满足驾驶员主观感受的同时, 提高车辆的操控性、安全性、经济型和舒适性等性能指标。
胡云峰, 曲婷, 刘俊, 施竹清, 朱冰, 曹东璞, 陈虹. 智能汽车人机协同控制的研究现状与展望. 自动化学报, 2019, 45(7): 1261-1280.
随着人工智能、互联网技术、通信技术、计算机技术的飞速发展, 以电动化、智能化及网联化为基础的智能汽车成为解决能源消耗、环境污染及交通安全等问题的有效途径。按照汽车智能化、自动化的发展进程, 美国汽车工程师协会将智能汽车的发展分为手动驾驶、驾驶辅助、部分自动化、有条件自动化、高度自动化和完全自动化6个级别, 如图1所示. 随着汽车驾驶智能化程度的不断提高,智能汽车逐步具有了自适应巡航、特定工况自动驾驶等更高级别的智能控制技术. 在这个过程中, 控制系统的智能化水平不断提高, 其在车辆运动中所起的作用也越来越大, 而驾驶员的作用逐渐被弱化. 但是, 驾驶员作为车辆的购买者和使用者, 其对智能汽车操控性、安全性、舒适性及经济性等性能的主观感受与评价是衡量智能化技术好坏的核心标准, 也是汽车智能化技术能否被消费者接受的重要因素.
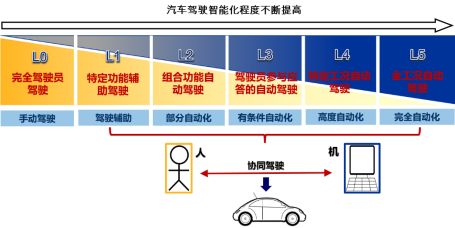
图1 汽车智能化发展进程
智能汽车人机协同控制是一种典型的人在回路中的人机协同混合增强智能系统, 如图2 所示. 人类驾驶员与智能控制系统之间存在很强的互补性, 一方面, 与智能控制系统的精细化感知、规范化决策、精准化控制相比, 驾驶员的感知、决策与操控行为易受心理和生理状态等因素的影响, 呈现随机、多样、模糊、个性化和非职业性等态势, 在复杂工况下极易产生误操作行为; 另一方面, 智能控制系统对比人而言, 学习和自适应能力相对较弱, 环境理解的综合处理能力不够完善, 对于未知复杂工况的决策能力较差. 因此, 借助人的智能和机器智能各自的优势, 通过人机协同控制, 实现人机智能的混合增强, 形成双向的信息交流与控制, 构建1 + 1 > 2" 的人机合作混合智能系统, 可极大促进汽车智能化的发展.
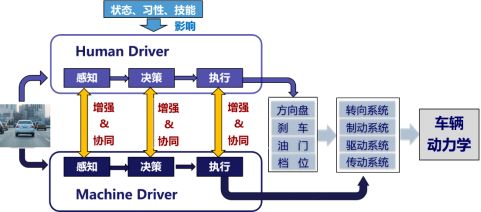
图2 人机协同控制结构示意图
在人机共驾系统中, 风格各异的驾驶员与车辆智能控制系统共同构成了对智能汽车的共驾控制, 两者之间动态交互, 形成相互耦合与制约关系. 目前车辆驾驶任务中人机交互方式大多只停留在感知、决策或执行等单一层面, 交互方式相对简单, 难以应对未来人机共驾系统多层次多维度交互与协同的需求, 且缺乏深入研究驾驶员的状态、意图和行为, 以及驾驶员对智能控制系统在感知层、决策层和执行层等驾驶过程中的影响. 因此, 深入剖析和理解复杂车辆智能控制系统和驾驶员的驾驶机理, 探索两者之间的冲突与交互机制, 建立人机共驾理论体系, 构建人性化、个性化的人机合作混合智能系统, 搭建人机共驾系统测试验证平台, 可极大促进汽车智能化的发展进程. 具体研究展望包含如下几个方面:
1)驾驶员驾驶意图、状态及习性建模与预测;
2)人机协同控制车辆的运动稳定性和碰撞安全性控制;
3)驾驶员在回路的人机协同感知与认知;
4)人机在决策规划以及控制执行中的交互与协同;
5)个性化人机共驾系统开发;
6)人机协同控制系统验证平台开发与测试评价方法.
针对人机协同机理及切换控制提出创新性解决方案, 解决驾驶行为建模、驾驶员驾驶状态感知和意图识别、驾驶员在回路的人机协同感知与认知、人机在决策规划和控制执行中的交互与协同、个性化人机协同控制技术, 以及人机协同控制技术的测试与评价等问题, 不仅在解决人机协同控制共性理论研究方面具有创新意义, 同时能够对我国汽车产业、人工智能产业的发展起到强有力的支撑作用, 为实现《中国制造2025》的产业化目标提供基础理论与关键技术支撑.
作者简介

胡云峰, 吉林大学副教授. 2012 年在吉林大学获得工学博士学位. 主要研究方向为汽车动力总成系统控制及汽车主动安全控制.
E-mail: huyf@jlu.edu.cn

曲婷, 吉林大学讲师. 2016 年于吉林大学获得工学博士学位. 主要研究方向为驾驶员行为建模, 驾驶员类型辨识, 人机协同控制.
E-mail: quting@jlu.edu.cn

刘俊, 吉林大学博士研究生. 2014 年于吉林大学获得学士学位. 主要研究方向为车辆稳定控制, 自动驾驶, 人车协同控制.
E-mail: liujun16@mails.jlu.edu.cn

施竹清, 吉林大学博士研究生. 2014 年于吉林大学获得工学学士学位. 主要研究方向为人机协作控制和模型预测控制.
E-mail: shizq16@mails.jlu.edu.cn

朱冰, 吉林大学教授. 2010年于吉林大学获得工学博士学位. 主要研究方向为汽车智能集成控制, 智能汽车人机共驾.
E-mail: zhubing@jlu.edu.cn
曹东璞, 加拿大滑铁卢大学教授. 2008年于加拿大康戈迪亚大学获得博士学位. 主要研究方向为车辆控制和智能化, 自动驾驶, 平行驾驶. 已发表130 余篇论文和1 件美国专利.
E-mail: dongp ca@yahoo.com

陈虹, 吉林大学教授. 1997 于德国斯图加特大学获得工学博士学位. 主要研究方向为预测控制, 鲁棒控制, 非线性控制和汽车控制.
E-mail: chenh@jlu.edu.cn
来源:AAS自动化学报

【重要通知】关于开展2019年度中国自动化学会会士候选人提名工作的通知
【重要通知】关于2019年度CAA科学技术奖励推荐工作的通知
【重要通知】关于开展2019年度中国自动化与人工智能创新团队奖推荐工作的通知
【CAA】中国自动化学会选举产生第十一届理事会领导机构(内附名单)
热烈祝贺中国自动化学会常务理事、火箭军工程大学教授胡昌华荣获中共中央军委通令记功
地址:北京市海淀区中关村东路95号
邮编:100190
电话:010-82544542(综合)
010-62522472(会员)
010-62522248(学术活动)
010-62624980(财务)
传真:010-62522248
邮箱:caa@ia.ac.cn
官方微信公众号(英文)
名称:CAA OFFICIAL
微信号:caaofficial

会员微信公众号
名称:CAA会员服务
微信号:caa-member







