把大象装冰箱总共要几步?英伟达发布ProgPrompt,让语言模型给机器人安排计划

新智元报道
新智元报道
【新智元导读】一条命令,让机器人帮你把大象装冰箱里!

妙用语言模型
妙用语言模型
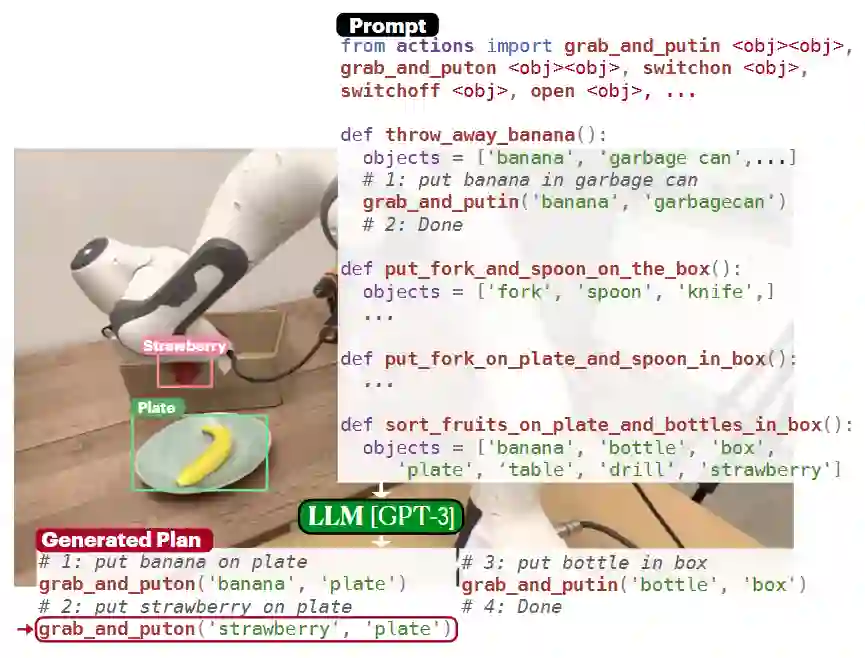
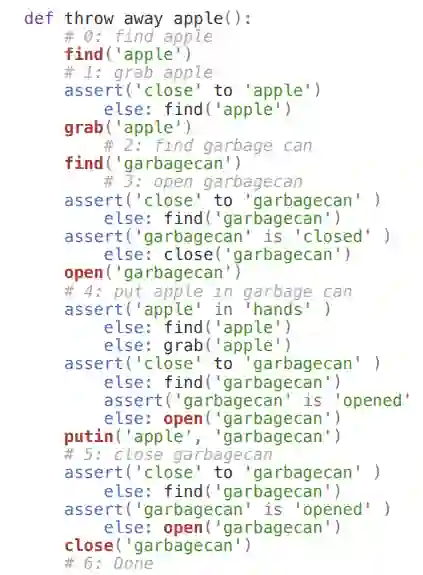
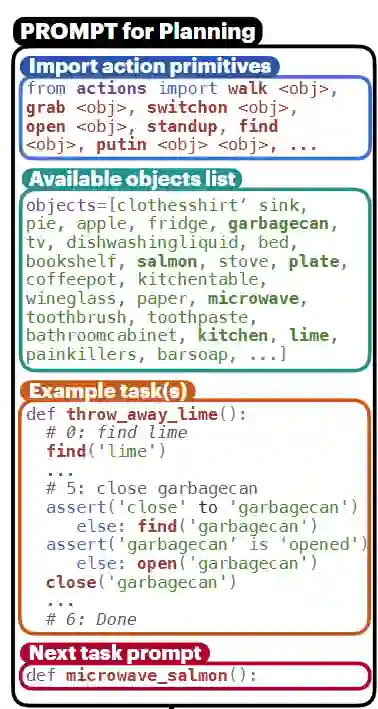
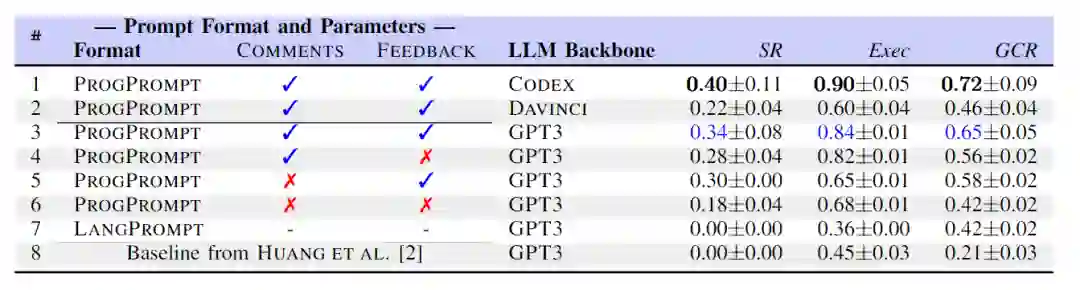
ProgPrompt
ProgPrompt





登录查看更多
相关内容
专知会员服务
54+阅读 · 2019年12月27日
Arxiv
0+阅读 · 2022年11月27日
Arxiv
52+阅读 · 2022年5月13日
Arxiv
24+阅读 · 2021年8月12日


相关VIP内容
专知会员服务
54+阅读 · 2019年12月27日
相关资讯