数据集|ALITA:用于自动驾驶的大规模增量数据集

极市导读
一个用于自动驾驶的大规模增量数据集 >>加入极市CV技术交流群,走在计算机视觉的最前沿
0. 引言
位置识别与闭环检测是自动驾驶系统中的关键任务,但现有方法基本都是在特定场景下进行评估,这样很难评价现有方法在大规模、长期、变视角环境下的准确性、鲁棒性和泛化能力,即很难判断其在实际应用中的性能。而收集符合要求的实际大规模场景数据集需要复杂、昂贵以及能够长期运行的采集平台。
本文将为大家分享一个用于自动驾驶的大规模增量数据集,该数据集可以用于实际场景的性能评估。数据集,以及用于数据处理和本地评估的Python-API已经开源。
1. 论文信息
标题:ALITA: A Large-scale Incremental Dataset for Long-term Autonomy
作者:Peng Yin, Shiqi Zhao, Ruohai Ge, Ivan Cisneros, Ruijie Fu, Ji Zhang, Howie Choset, Sebastian Scherer
来源:2022 Robotics
原文链接:https://arxiv.org/abs/2205.10737
数据集链接:https://github.com/MetaSLAM/ALITA
2. 摘要
对于长期自动驾驶,大多数位置识别方法主要是在简化场景或模拟数据集上进行评估,这不能为评估当前同时定位和地图创建(SLAM)的就绪性提供坚实的证据。
在本文中,我们提出了一个长期位置识别数据集,用于大规模动态环境下的移动定位。该数据集包括一个校园尺度的轨迹和一个城市尺度的轨迹:
-
校园轨迹关注长期属性,我们在10个轨迹上记录激光雷达设备和全景相机,每个轨迹在不同照明条件下重复记录8次。
-
城市轨道聚焦于大范围的属性,我们将激光雷达设备安装在车辆上,穿越120公里的轨迹,包括开放的街道、居民区、自然地形等。
它们包括200小时的城市环境中各种场景的原始数据。在每个轨迹上提供两个轨迹的地面真实位置,这是从全球定位系统获得的,具有附加的基于一般ICP的点云细化。为了简化评估过程,我们还使用Python-API提供了一组地点识别指标,用于快速加载数据集并评估不同方法的识别性能。该数据集旨在寻找具有高位置识别准确性和鲁棒性的方法,并为真正的机器人系统提供长期自主性。
3. 数据集分析
作者提出了一个用于大规模环境下长期位置识别的数据集iData,数据集的目标是长期定位这一挑战任务,该数据集包含两个轨迹分支:
(1) 城市数据集,它记录了城市尺度中总共50条车辆轨迹和120公里轨迹的激光雷达数据输入,每个轨迹至少在一个交叉点与其他轨迹重叠,并且在数据集中有158个重叠。采集地点位于宾夕法尼亚州匹兹堡市。
(2) 校园数据集,分别在不同的照明和视点下,在10个不同的轨迹上收集了8次重复的全景视觉输入和激光雷达输入,全长约36公里。采集地点位于卡耐基梅隆大学(CMU)校园区域。
图1所示是数据集的可视化结果,表1所示是不同数据集的比较结果。
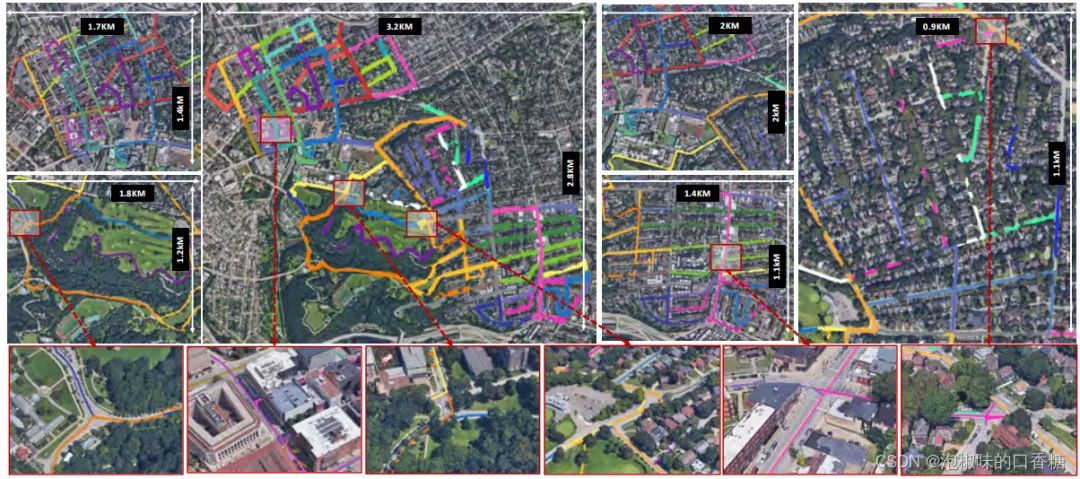
包括使用Velodyne-16和Xsens MTI-300 IMU采集的城市和校园数据集。城市数据集包含5个区域 (以绿色、黄色、红色、纱色和蓝色着色),涵盖街区、住宅区、公园和商业建筑。校园数据集以紫色显示,涵盖了卡内基梅隆大学的主校区
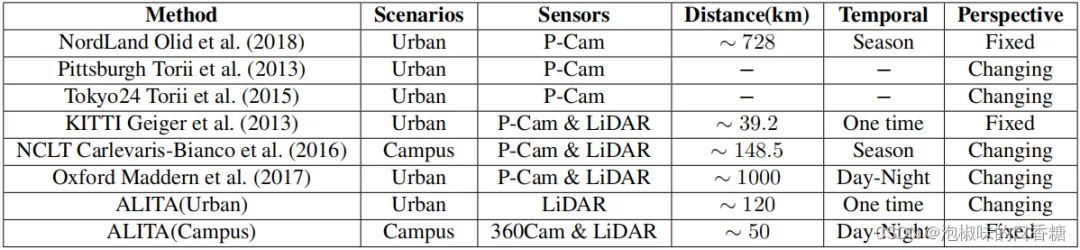
大多数数据集都是针对短期、固定条件或视点位置识别任务,难以评估在现实世界中长期、大规模应用中的定位性能。与现有数据集相比,作者提出的城市数据集覆盖了大规模变化的3D场景,并且可以应用于不同视点差异下的评估,涵盖了长期动态对象、照明和视点差异。作者提出的城市和校园数据集都为准确的位置识别提供了事实依据,有助于对不同方法进行评估。此外,该城市数据集已在ICRA 2022中使用General Place Recognition Competition对当前新的3D位置识别方法进行基准测试。
4. 采集平台
4.1 硬件设置
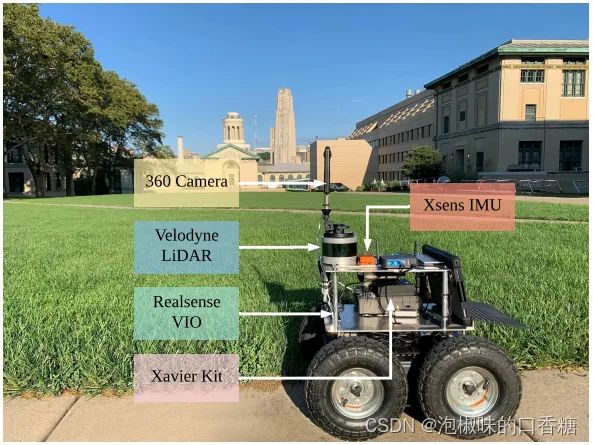
作者的数据采集平台包含一台Velodyne-16激光雷达扫描仪、Xsens MTI-300惯性测量单元和一台Nvidia Jetson TX2板载计算机。对于城市数据集,作者将平台安装在移动车辆的顶部,并与GNSS定位系统同步运行,以记录城市规模环境的地面真实位置。如图2所示是作者用于校园数据集采集的平台,基础平台与城市数据集相同。此外,作者在激光雷达设备的顶部安装额外的全景相机和实感VIO设备(T265),进而提供时间同步的激光雷达输入和360°全景视觉输入。
4.2 数据集格式
作者提出的城市数据集由4种类型的数据组成,主要描述如下:
(1) 全局地图:全局地图被处理以包含以点云数据(PCD)文件格式提供的每个轨迹的3D结构。
(2) 轨迹:每个轨迹主要通过LOAM生成并通过交互式SLAM进行优化,文件格式为TXT。
(3) 子地图:每个全局地图沿着对应的轨迹分成若干子地图,一个子地图的大小为50m*50m,每两个子地图之间的距离约为2m。子地图数据以点云数据(PCD)文件格式提供。
(4) 真实位姿:对于每个子地图,相应的真实位姿包含位置和姿态信息。作者使用NumPy进行数据处理,并以标准二进制(NPY)文件格式提供。
作者提出的校园数据集由4种类型的数据组成,主要描述如下:
(1) 全局地图:全局地图被处理以包含以点云数据(PCD)文件格式提供的每个轨迹的3D结构。
(2) 里程计:里程计由壤LOAM生成并以TXT文件格式提供。
(3) 相对里程计:相对里程计由交互式SLAM处理,以生成其他序列相对于参考序列的相对位置。该数据以TXT文件格式提供。
(4) 全景图片:对于里程计中的每一帧位姿,相应的全景图片以PNG文件格式提供。
5. 总结
在2022 Robotics 论文"ALITA: A Large-scale Incremental Dataset for Long-term Autonomy"中,作者提出了iDATA数据集,旨在实现大规模环境下的长期位置识别任务。该数据集将有助于处理光照和视点变化的位置识别研究,以及基于激光雷达图像(全景)融合的机器人研究。此外,由于提出的iDATA数据集在轨迹之间提供了丰富的重叠,该数据集也可用于地图合并系统。
公众号后台回复“项目实践”获取50+CV项目实践机会~

“
点击阅读原文进入CV社区
收获更多技术干货

