轻小型无人机多光谱遥感技术应用进展
摘要: 随着光谱传感技术和图像处理与分析软件的日益成熟,无人机多光谱软硬件一体化程度和观测精度及易用性得到极大的发展。无人机多光谱遥感已在农业、林业、资源、生态、环境保护等领域应用日益广泛。本文概述了无人机飞行平台、多光谱传感器等硬件技术的发展,和无人机遥感影像的几何校正、辐射校正图像处理技术及数据处理流程,并对无人机多光谱遥感在植被长势监测、存在问题、精细分类与地物识别、病虫害监测、生物量和产量估算等方面的应用潜力和发展方向进行了系统分析和总结,以期为开展相关领域研究提供参考。建议各行业部门的专业人员与遥感、计算机科学等领域的专家密切合作,制订无人机多光谱遥感技术的相关标准和规范,共同推进并普及无人机多光谱遥感技术。
0 引言
多光谱遥感是指用具有两个以上波谱通道的传感器对地物进行同步成像的一种遥感技术,它将目标物体反射辐射的电磁波信息分成若干波谱段进行接收和记录[1-2]。实现多光谱遥感的传感器为多光谱相机,一次拍摄可形成多幅不同光谱的影像[2]。
轻小型无人机遥感系统作为低空遥感系统的重要组成部分,具有机动灵活、操作简便、按需获取高时空分辨率数据且应用成本低的优势,有效弥补了卫星及大型航空遥感系统在地表分辨率低、重访周期长、受水汽影响大等不足,为中小尺度的遥感应用研究提供了新的工具[3-4]。轻小型无人机遥感系统是在轻小型无人机平台上配备相应的传感器(可见光相机、多光谱相机、高光谱仪、红外传感器、激光雷达等),利用通信技术和定位定姿技术快速无损获取关于目标地物的高分辨率影像及数据,经过处理的数据作为参数输入遥感反演模型,相关产出可用于参数提取或者行业具体应用。
目前,搭载在轻小型无人机平台上的多光谱遥感应用日益广泛,为系统了解该技术及其应用领域,本文对飞行平台、多光谱相机等硬件技术加以概述,并从几何和辐射校正等方面对多光谱图像数据处理技术及数据处理流程进行梳理和总结,同时对小型无人机多光谱遥感技术未来应用领域和发展方向进行系统分析和展望。
1 轻小型无人机多光谱遥感系统
1.1 无人机遥感系统
完整的轻小型无人机遥感系统如图1所示,主要包括:无人机平台、微小型传感器、地面站系统和数据处理系统[5-9]。其中,无人机平台即无人机本身,是搭载飞控、导航定位系统及传感器等设备的载体。微小型传感器是指安装于无人机平台上的获取遥感数据的传感器及其控制装置,其中的控制装置通常与导航、飞控系统进行一体化设计,具有触发控制传感器、记录拍照时刻的位置及姿态信息的功能。地面站系统主要用于飞行参数设置、路径规划和无人机实时操控等。数据处理系统主要完成遥感影像的数据存储、处理及产品展示等。地面站系统与飞控之间通过数据传输系统进行通信,主要实现飞行数据、控制指令、图像数据的实时交互传输等。
1.2 无人机平台
轻小型无人机飞行平台种类繁多,有无人直升机、固定翼无人机、多旋翼无人机、混合翼无人机等多种机型[10-11]。飞艇与飞翼无人机由于体积和重量较大[7],不在本文的讨论之列。直升机起降灵活,可自由悬停,载重也较大,但操作复杂,成本较高[12-13]。固定翼无人机飞行速度快,续航时间长,覆盖面积广,但飞行速度难以根据需求调节,且载荷较小[14]。多旋翼无人机飞行速度可控,飞行高度可调且可以低空飞行,起降灵活,成本较低,但是其飞行时间较短,载荷能力也较小[15]。一般来说,小型无人机的有效载荷为10 kg以下,最大飞行高度3 000 m以内,最大飞行速度不超过33 m/s[6]。从组成部分来说,无人机平台主要包括无人机体、飞行控制系统、遥控器、能量系统以及地面站[6,10]。其中,地面站主要完成航线规划和飞行参数设置,其自动化及智能化程度的提高显著降低了无人机飞行平台的操作难度,当对同一个试验区进行多次重复观测时,利用地面站航线信息可方便实现飞行任务的重复执行。飞行控制系统主要完成飞机的操控,如起飞、降落、空中飞行姿态控制等,是无人机系统的关键技术之一。总体而言,小型固定翼无人机和电动多旋翼是目前最常用的飞行平台,因为这些飞机在价格、载荷能力和飞行时间等方面进行了可行的折衷处理[2,16]。
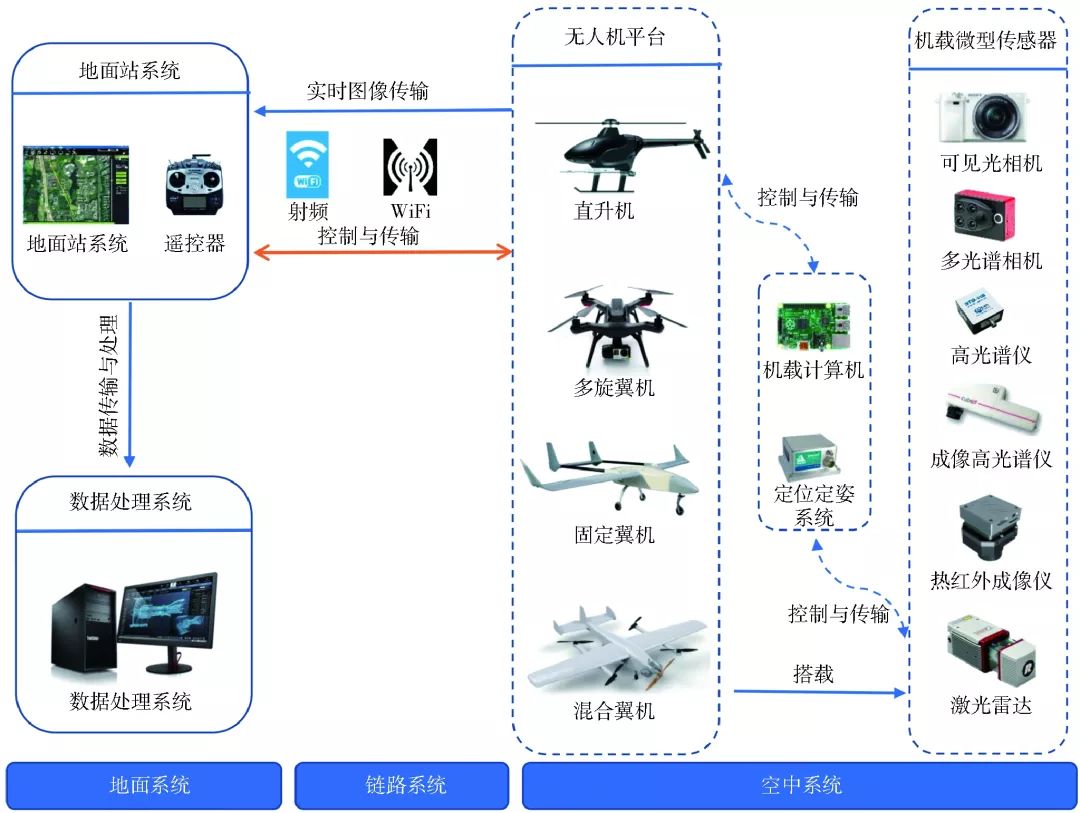
图1 无人机遥感系统组成图
Fig.1 Structure diagram of UAV remote sensing system
1.3 小微型多光谱传感器
受限于小型无人机的有效负荷能力,一般要求多光谱传感器必须满足质量轻、体积小、精度高、功耗低的要求。本文的小/微型多光谱传感器仅包括质量在4 kg以内的商业化产品[17]。按照探测波长的不同,这些传感器主要分为可见光波段(400~760 nm)数码相机(Digital camera)、可见近红外波段(400~1 100 nm)多光谱相机(Spectral camera)、热红外波段(3.6~13.5 μm)相机(Thermal camera)等。其中,代表性的小/微型多光谱传感器主要有ADC lite(Tetracam Inc., Chatsworth, CA, USA)、RedEdge(Micasensen Inc., Seattle, WA, USA)、Parrot Sequoia(Parrot Inc., Paris, France)、FLIR Tau 2 (FLIR Systems Inc., USA)等,其性能参数对比如表1所示。
表1 小微型多光谱传感器产品比较分析
Tab.1 Specification and parameter of multispectral cameras
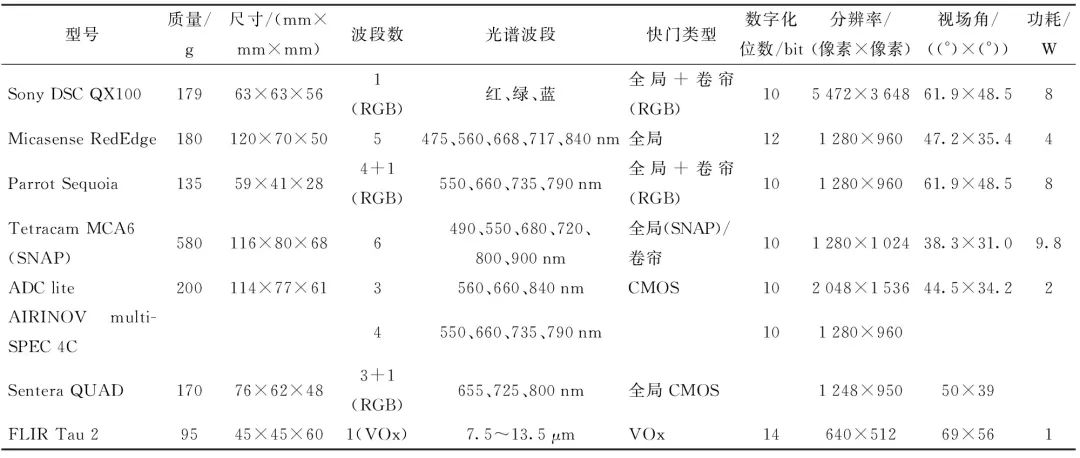
型号质量/g尺寸/(mm×mm×mm)波段数光谱波段快门类型数字化位数/bit分辨率/(像素×像素)视场角/((°)×(°))功耗/WSonyDSCQX10017963×63×561(RGB)红、绿、蓝全局+卷帘(RGB)105472×364861.9×48.58MicasenseRedEdge180120×70×505475、560、668、717、840nm全局121280×96047.2×35.44ParrotSequoia13559×41×284+1(RGB)550、660、735、790nm全局+卷帘(RGB)101280×96061.9×48.58TetracamMCA6(SNAP)580116×80×686490、550、680、720、800、900nm全局(SNAP)/卷帘101280×102438.3×31.09.8ADClite200114×77×613560、660、840nmCMOS102048×153644.5×34.22AIRINOVmulti-SPEC4C4550、660、735、790nm101280×960SenteraQUAD17076×62×483+1(RGB)655、725、800nm全局CMOS1248×95050×39FLIRTau29545×45×601(VOx)7.5~13.5μmVOx14640×51269×561
1.3.1 小型多光谱相机原理与分类
可见光波段数码相机是无人机遥感系统中应用最为广泛的一类传感器,可快速获取可见光波段灰度或者彩色图像。可见光波段数码相机最大的优势是成本低、像素数高、操作简单。无人机遥感获取可见光影像对环境要求相对较低,晴天和阴天条件下均可进行数据采集,但对曝光设定有一定的要求,云的遮挡和环境光线的变化易导致图像曝光不足或过度。
可见近红外波段多光谱相机通过分光获取不同波段的单色图像,根据分光方式的不同可分为单镜头加分光系统[18]和多镜头分光[19-20]等类型。其中,多镜头分光是通过在多个成像焦面传感器前端分别设置不同谱段的窄带干涉滤光片的方式实现[21]。 按感光元件的不同,多光谱传感器分为CCD(Charge coupled device)相机和CMOS(Complementary metal oxide semiconductor)相机两种。CCD在影像品质等方面均优于CMOS,而CMOS则具有低成本、低功耗以及高整合度的特点。对应于采用CCD传感器的多光谱相机多采用全局快门(如RedEdge、Sequoia等相机),所有像素点同时收集光线,同时曝光,有利于在飞行状态下获取无畸变的图像。而对应于CMOS传感器的多光谱相机多采用卷帘快门(如MCA6)。目前,主流的小型多光谱相机一般是采用独立的镜头与传感器,传感器前端设置不同波段的滤光片(如Tetracam MCA 6、Micasense RedEdge、Parrot Sequoia等相机)实现多波段影像的同时获取。
在实际应用中,市场上消费级数码相机的面阵探测器前面都包含一个阻止紫外线和红外线带通滤波器,用于仅透过入射辐射中的可见光部分,但实际上探测器的响应波长可以达到近红外波段的900~1 100 nm,这就为将数码相机改造为多光谱相机提供了可能[22]。如LELONG等[23]将数码相机(Canon EOS 350D和SONY DSC-F828)的可见光带通滤光片去除,改造成为一个包含红(R)、绿(G)、蓝(B)、近红外(NIR)4个波段多光谱相机(光谱范围覆盖570~850 nm)。此外,应用中还可以通过将数码相机与独立的红外相机(如Canon S110 NIR)[24-25]组合起来实现无人机多光谱观测。
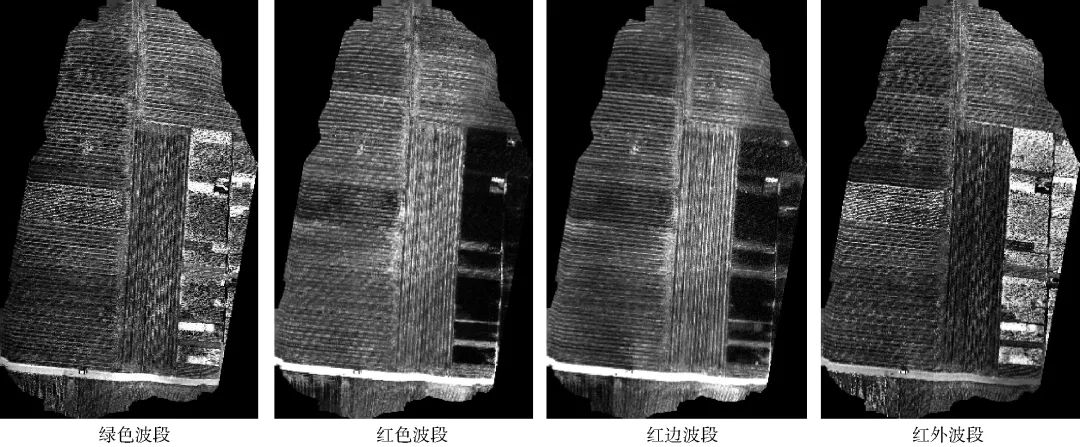
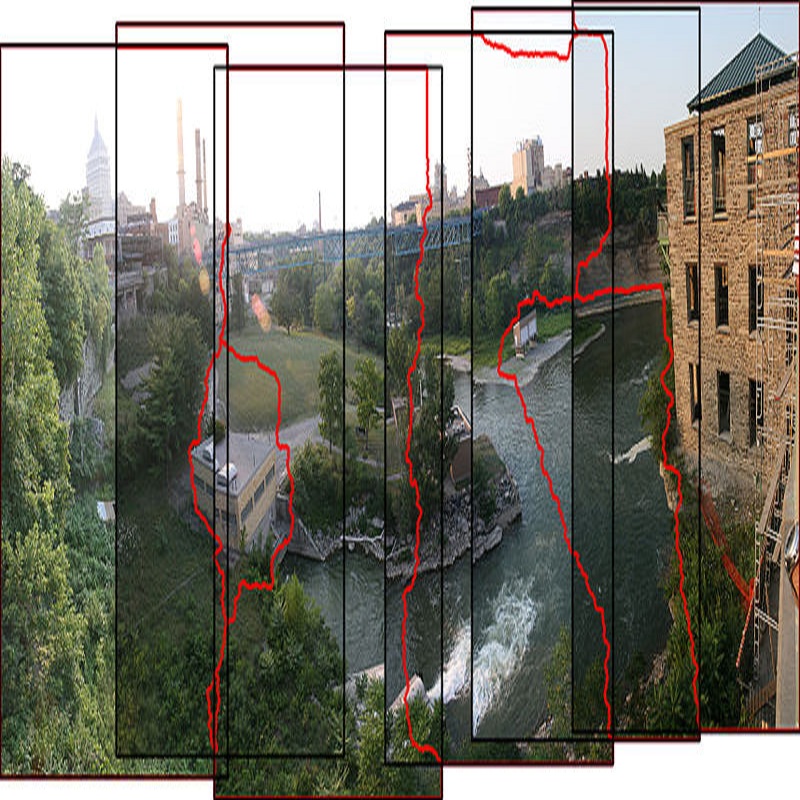
图2 多光谱相机拍摄的多光谱图像拼接图(2017年,河南省安阳市)
Fig.2 Map of multispectral camera(2017, Anyang, Henan)
热红外相机[26]通过对热红外波段(2~1 000 μm)敏感的探测器对目标成像,能反映出目标表面的温度信息。由于气孔导度、光合特性和蒸腾速率与植被冠层温度密切相关,高分辨率的红外热成像技术可以用来确定植被在非生物胁迫状态下的响应,如水分胁迫[27-28]等。此外,利用哺乳动物温度恒定的特点,热红外相机还可用于野生动物物种的精确识别[29]。受限于热红外探测器的像元数目(如FLIR Tau2的像素数为640×512),目前热红外相机的分辨率较低,当对非均质目标进行观测时,混合像元(例如一个像元包含同时来自土壤和植被的信号)的存在会显著影响观测的精度[30]。利用更高分辨率的RGB图像与热红外数据融合可以降低混合像元的影响[6]。此外,无人机只能搭载小型热成像摄像机,这些设备通常使用非制冷的微测辐射热计传感器(如氧化钒VOx),传感器测量值温漂较大[28],另外,还需要消除背景温度(包括太阳辐射、环境温度和风速等)的影响[31],因此,必须选择合适的方法对热红外数据进行大气纠正并进一步开展现场校准[28,32]。
1.3.2 多光谱传感器获取的信息
本科院校图书馆、公共图书馆与科研院所图书馆对新进人才需求较大,但对图情专业毕业生而言,不同类型图书馆的要求不尽相同。具体来说,公共图书馆对图情专业毕业生专业技能要求偏向操作性;本科院校图书馆专业要求较高,并希望具有其他专业背景;科研院所图书馆对图情专业毕业生要求最高,要求其能独立开展参考咨询业务,并具备一定的科研能力。
多光谱相机输出的影像数据格式类型包括JPEG、TIFF或RAW等,图像的数字化位数一般为8~12位。由于小型多光谱相机的像元数较小,并且飞行高度较低,因此单幅影像的成像面积较小,将飞行中获取的多幅影像进行拼接、校准和计算可以获取大幅拼接影像及一系列的光谱指数图像数据。图2展示了Sequoia相机拍摄的多光谱图像的拼接图,图中包括4个不同波段的拼接图像。根据多光谱相机具体的波段设置,可获取的植被指数主要包括:比值植被指数(Ratio vegetation index,RVI)、归一化植被指数(Normalized difference vegetation index,NDVI)、土壤调节植被指数(Optimized soil adjusted vegetation index,OSAVI)、氮素反射指数 (Nitrogen reflectance index,NRI)、增强植被指数(Enhanced vegetation index,EVI)、转换型叶绿素吸收反射率指数(Transformed chlorophyll absorption ratio index,TCARI)和光化学植被指数(Photochemical reflectance index,PRI)等。另外,利用无人机多光谱影像数据还可以生成数字表面模型DSM(Digital surface model)信息。综上所述,无人机多光谱系统可以获取关于地物的多光谱信息、纹理信息和结构信息[33]。
1.4 无人机飞行参数设置
常规无人机的设置参数包括飞行高度、飞行速度、飞行轨迹规划等。这些参数往往相互影响,需要相互调整配合才能保证无人机遥感系统实现最佳的数据获取能力。对于多光谱无人机遥感系统,飞行的高度决定了地表分辨率,飞行的航向重叠率和航间重叠率决定了拼接的质量。传统航空摄影技术规范中航向重叠度(53%~65%)和旁向重叠度(15%~40%)要求较高[34] ,获取的数据量较大,因此数据采集处理的时效性较低,在应急救援和灾害损失调查等时效性要求较高的特殊领域,或者需要大面积采集图像的应用场景下,低重叠度(15%~30%)的数据采集方式和处理方法越来越受到重视[35],韩峰等[36]通过对无人机搭载的Micro MCA12 Snap多光谱数据进行处理分析,在算法和软件的支持下,航向30%左右的低重叠度无人机图像拼接完全可以得到适合所有类型应急的大面积图像数据和DSM数据,特别是在现场应急响应的使用中,采用低重叠度的拍摄方法和拼接方法可极大地提高应急响应时间。在实际应用中,为了保证拼接的质量,对于森林或者稠密的作物,通常建议的多光谱相机的航向重叠率为75%~85%,旁向重叠率为60%~70%。为满足影像重叠度要求,实际作业中需要根据作业区域、飞行高度、图像传感器参数、地面分辨率等参数进行航线规划,并且将相机的拍照帧频与无人机的飞行速度进行合理匹配,其相关关系为
f/H=S/G
(1)
式中 f——相机焦距 H——飞行高度
S——相机传感器电荷耦合元件单个像元大小
G——影像的地面分辨率
2 无人机多光谱信息获取与数据处理
多光谱飞行数据为各个波段独立的覆盖范围较小的照片[37],经过摄影测量处理和辐射校准处理,可以获取大幅面的具有确定反射信息的影像。数据处理流程如图3所示,主要包括多光谱数据处理、图像拼接、几何校正、辐射校正和遥感产品生成等。
2.1 摄影测量处理
摄影测量处理是将大量的单波段的无人机多光谱图像自动拼接为无缝多光谱正射影像并且进行几何校正和地理配准。
大量自动化摄影测量工具软件如Pix4Dmapper(Pix4D SA, Lausanne, Switzerland)[38]、PhotoScan(Agisoft LLC, St.Petersbueg, Russia)[39]、ERDAS LPS(Leica Photogrammetry Suite, Leica, German)[28,40]、INPHO(Trimble,USA)等的出现为无人机多光谱数据的快速处理及广泛应用提供了便利。需要注意的是多光谱图像一般具有多个波段,用作特征匹配的波段选择对于匹配的结果影响显著[41],因此需要根据地物的反射特征、环境条件等进行特殊选择[37]。无人机多光谱系统获取的多光谱图片一般是通过飞机的机载GPS进行地理标记,在处理过程中,图像集在整个研究区域设置多个地理参考地面控制点(GCP),这些控制点可使用测量级GPS以厘米的精度进行地理定位,根据区域覆盖,可以灵活调整GCP数量[38]。图像数据经过初始对齐操作后,再利用控制点作为标记来优化稀疏点云并且将图像重新定向为大地坐标系[42]。高林等[43]对拼接后多光谱图像采用ENVI 软件的Image to Image模块,以高精度数码正射影像为参考图像,在图像不同位置均匀选取30个参考点进行几何校正,经检验影像几何纠正误差小于0.5个像元。几何校正还可以使用ArcGIS(ESRI, Redlands, CA, USA)实现,选择预设控制点或者地面特征点作为地理参考点[44]。杨贵军等[45]开展了基于无人机低精度 POS 数据的无人机数据几何校正研究,面向多遥感载荷获取的无人机遥感数据,实现无地面控制点的影像几何校正。
以PhotoScan软件处理RedEdge多光谱相机数据生成正射影像为例,其数据处理的流程如图4所示。①图像对齐,该软件在图像中查找同名点并进行匹配,还可以确定每幅图像的相机位置并优化相机校准参数,这个过程输出的是稀疏点云。②使用地面控制点的坐标对图像进行地理配准。为了优化摄像机,可以使用渐进式选择工具根据重建不确定性、投影精度和重投影误差等参数进行稀疏点云过滤,之后图像被重新对齐,大大提高准配准的准确性。③基于估计的相机位置和图像本身,由软件构建密集点云。④建立数字表面模型DSM,并在此基础上生成正射影像。
1981年,我出生在爷爷曾经住过的茅草屋里,那一年是他去世的第三年。听父亲说,爷爷一辈子从不计较个人得失,临终前也不占集体的一点便宜。因此,这间茅草屋承载着爷爷的光荣传统和我对他唯一的记忆,即便四处漏风、漏雨,全家人依然没有离开它的打算。
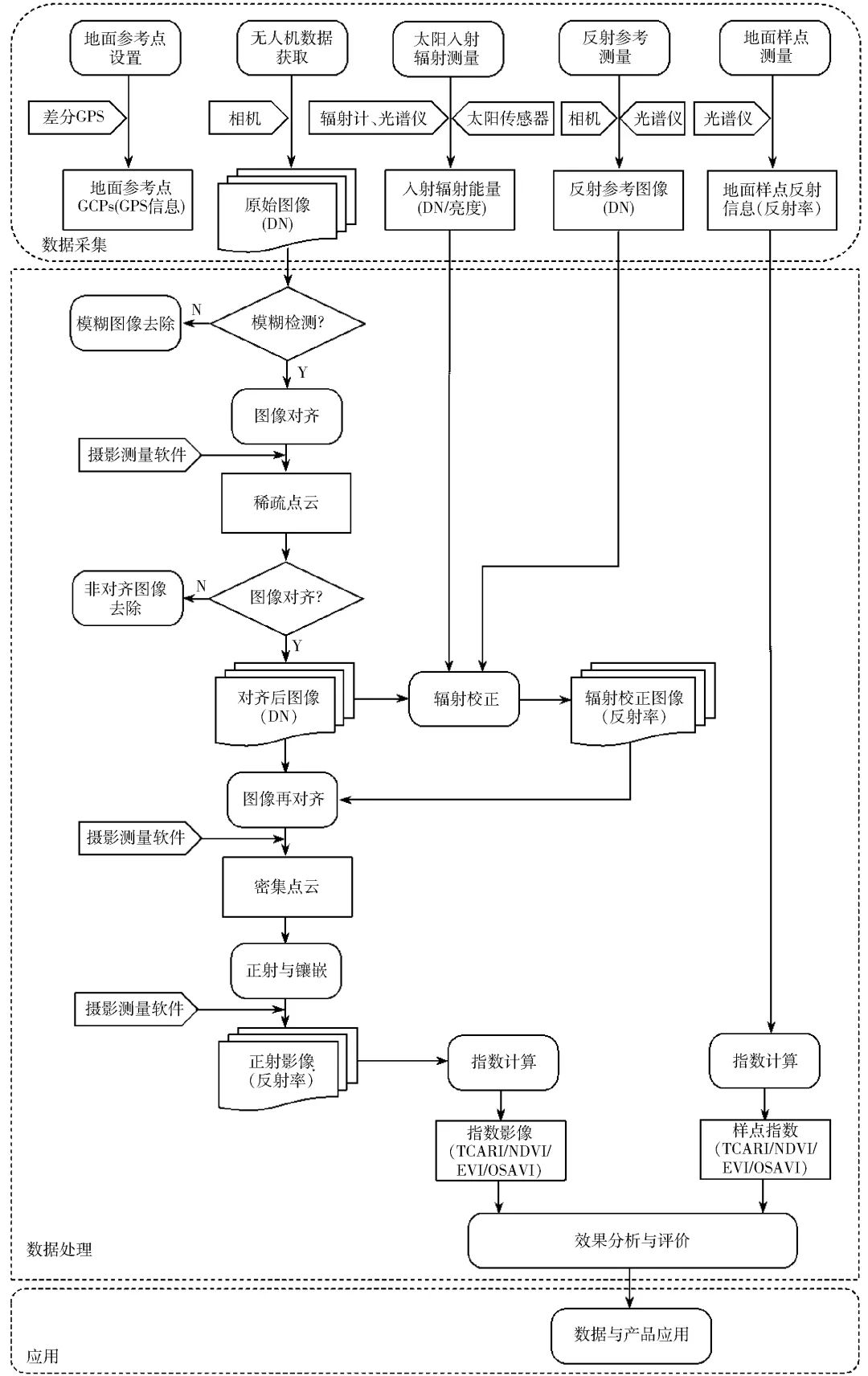
图3 无人机多光谱数据处理流程
Fig.3 Data processing flow of UAV multispectral system
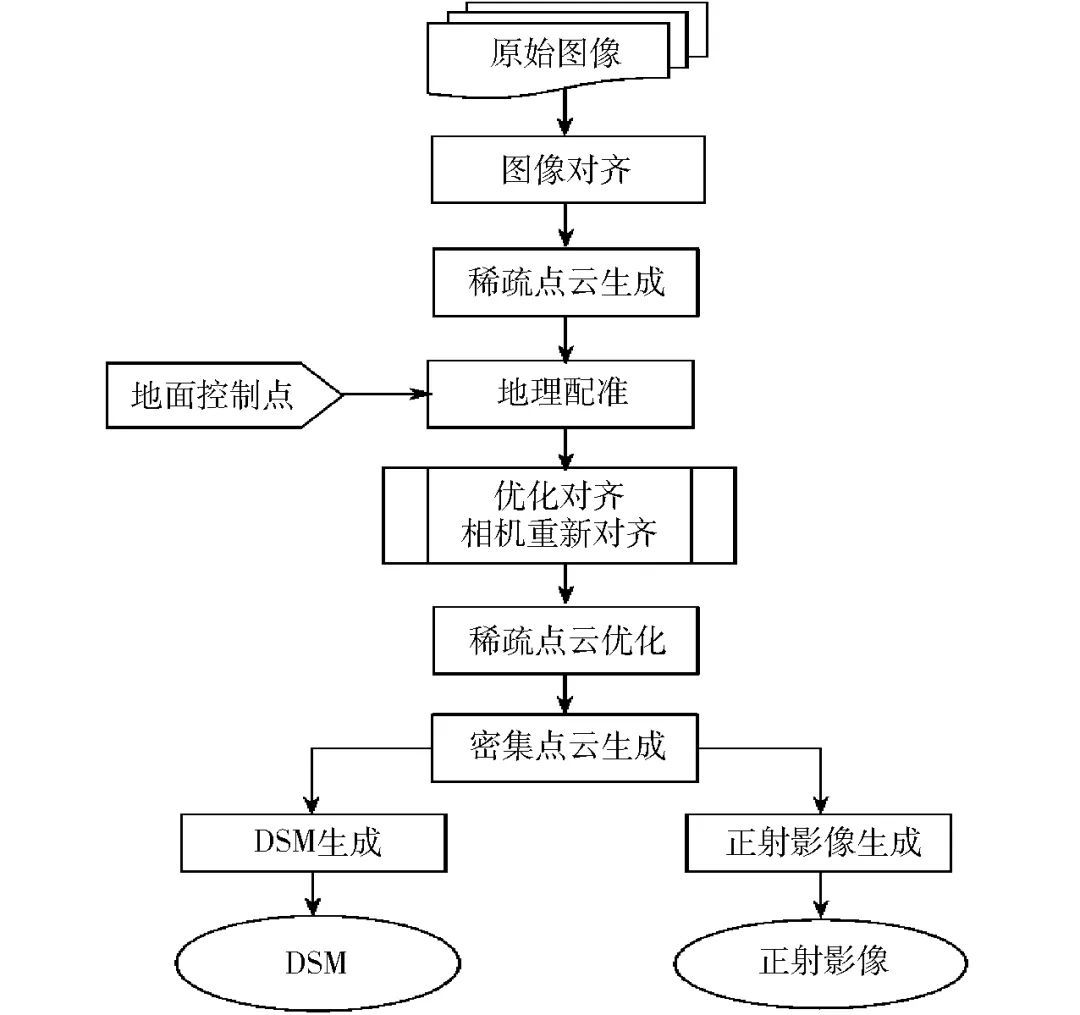
图4 摄影测量处理流程图
Fig.4 Flow chart of photogrammetry process
需要注意的是对多光谱进行摄影测量处理有可能改变原始图像的DN(Digital number)值[42],这在定量遥感应用中往往是不能接受的,因此还需要探索更好的多光谱图像摄影测量处理方法[37]。
2.2 辐射校正
辐射校正为将传感器的DN值转换为传感器的辐射亮度提供传递函数,用于克服太阳角度、双向反射分布函数(BRDF)效应、云的阴影、相机增益及曝光时间等因素对传感器测量值的影响[8]。辐射校正的流程如图5所示。
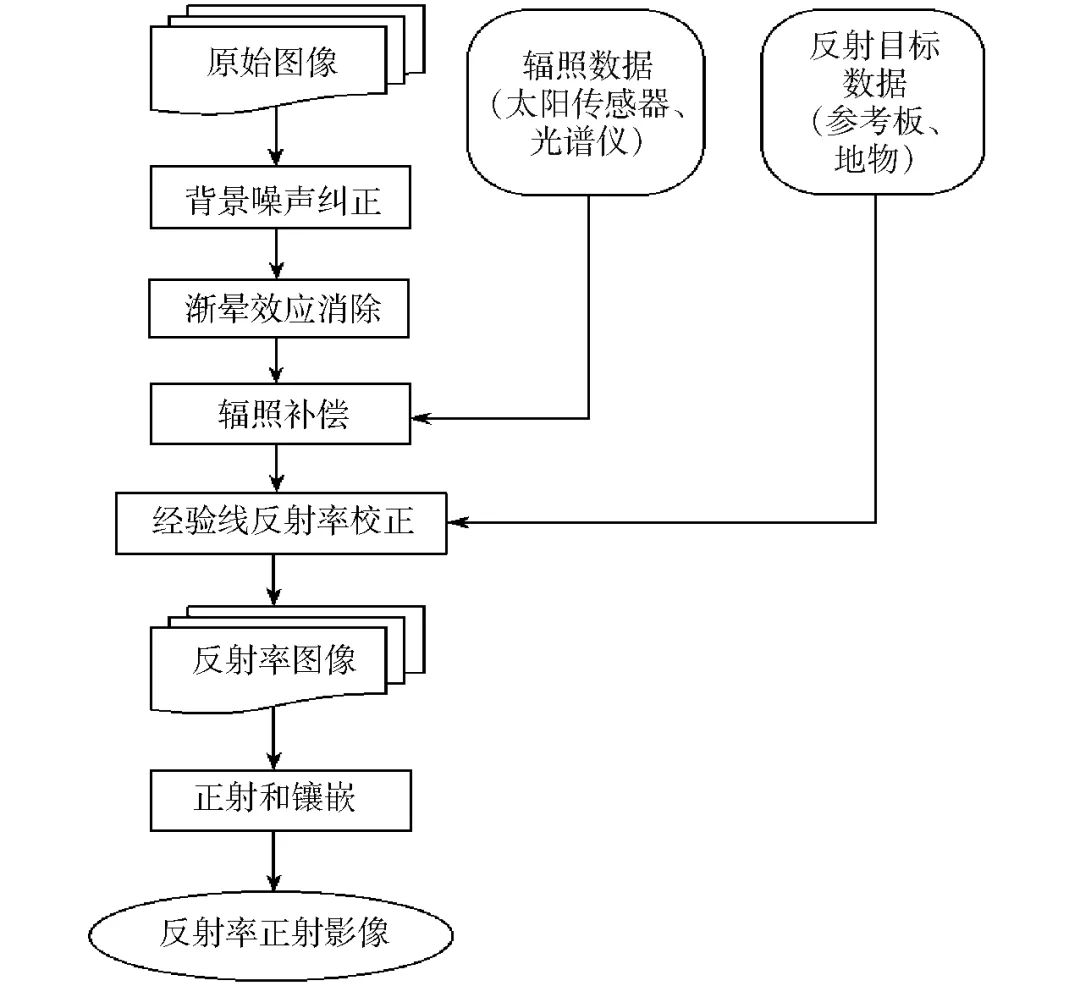
图5 辐射校正流程图
Fig.5 Flow chart of radiometric calibration
由于飞行高度较低,通常无人机影像相比卫星及有人飞机获取的影像具有更好的辐射均一性[46],可以省略大气纠正[47]。
辐射校正之前需要针对每幅图像进行背景噪声消除和渐晕效应消除[48]。图像背景噪声源可分为信号相关噪声(光子散粒噪声)和信号无关噪声(暗电流、放大器噪声、量化误差)。只要噪声不超过模数转换器的量化间隔,这些噪声源中的一些(如量化误差)就可以忽略不计。 然而,多光谱相机可能会受到非随机误差的影响[49],这会降低最终的图像质量。渐晕效应指的是当从其主点径向偏离时,图像的亮度衰减的效果。这种现象是由相机镜头光圈的有效尺寸引起的,晕映效应与镜头光圈尺寸成比例变化。此外,渐晕与焦距有关,广角镜头更受这种现象的影响。背景噪声与渐晕效应一般是在相机出厂时进行了测试,相应的误差纠正系数写在了相机里面,用户数据处理时,需要首先获得这些纠正参数,然后再对多光谱图像进行逐像素的纠正处理。针对每幅图像进行上述的纠正操作,得到一系列的经过DN值修正的新图像。
多光谱图像的辐射校正一般采用替代辐射校正法(Vicarious radiometric calibration),这种方法是一种现场测量与校正方法。考虑到每个像素的DN值与传感器探测到的辐射具有直接的关系,对于相机的每个光谱通道,可以建立相应通道的DN值与辐射的关系模型。以RedEdge相机为例,辐射校正所建立的辐射传输模型为

(2)
式中 p——归一化的像素DN值
pBL——暗电流校准值
a1、a2、a3——辐射校正因子
V(x,y)——渐晕校正多项式
te——曝光时间
g——传感器增益
x、y——像素位置
L——辐射值,W/(m2·sr·nm)
该辐射模型将图像的原始像素DN值转换为绝对光谱辐射值。它补偿了传感器暗电流、传感器的灵敏度、传感器增益和曝光设置以及镜头晕影效应。模型中使用的所有参数都可以从RedEdge像机保存的TIFF文件中的XMP元数据中读取。
选入“少儿万有经典文库”的原典在人类科学史上的重要性和经典性不容置疑,但其厚重的篇幅和深邃的理论体系,让一般读者都可能望而却步,更不要说理解能力有限的少年儿童。而在这套文库里,少儿彩绘版呈现出生机勃勃的气息,吸引着小读者从容地走进经典。
利用同样的辐射传输模型,构建基于一个或者多个参考目标的反射率与光谱辐射的经验线模型,实现最终的辐射校正。DEL POZO等[48]分析了影响多光谱相机输出值(DN)的因素,并且给出了详细的基于标准地物的替代辐射校正方法,结果表明平均的辐射测量误差在2.5%以内。AHMED等[38]基于具有已知反照率值的参考目标板,在每次飞行之前在地面上与成像的多光谱图像进行了辐射测量校准[50] ,利用ASD地物光谱仪(ASD Inc., Boulder, CO, USA)在全天的多个光亮度不同时段测量标准目标并获得光谱反射率,使用经验线校准方法[51-52]来校准多光谱影像的反射率数据,研究中使用了橙色、红色、白色和黑色防水油布和塑料片作为校准目标。采用类似的校准方法,VON BUEREN等[53]比较了无人机多光谱相机(MCA6)与地面光谱仪在反射率测量方面的一致性,通过测量不同的地物目标的反射率,得到其决定关系R2=0.92。高林等[43]为避免立地间获得的ADC Lite多光谱数据的时间与天空条件的差异影响,采用伪不变地物辐射纠正法,通过地面目标测得的反射率将多光谱图像值转换为图像反射率。现场的辐射校正方法需要均质的朗伯表面,已有研究表明,选择人造目标要比使用伪不变特征(Pseudo-invariant features)更为有效[54]。
为了减少飞行中光线变化对反射率的影响,越来越多的多光谱相机开始配置一个向上的太阳光传感器,同步记录拍照时刻的入射环境光能量,用于更精确的辐射校准,随着技术发展,有可能将目前依赖地面标准板的辐射校正流程大大简化。
2.3 专题图生成
利用无人机多光谱影像数据可以生成植被指数、数字表面模型(DSM)等信息。图6为归一化植被指数NDVI图像。图7为数字表面模型DSM图像。将这些信息与具体应用建立关系,可以生成不同的应用专题图。
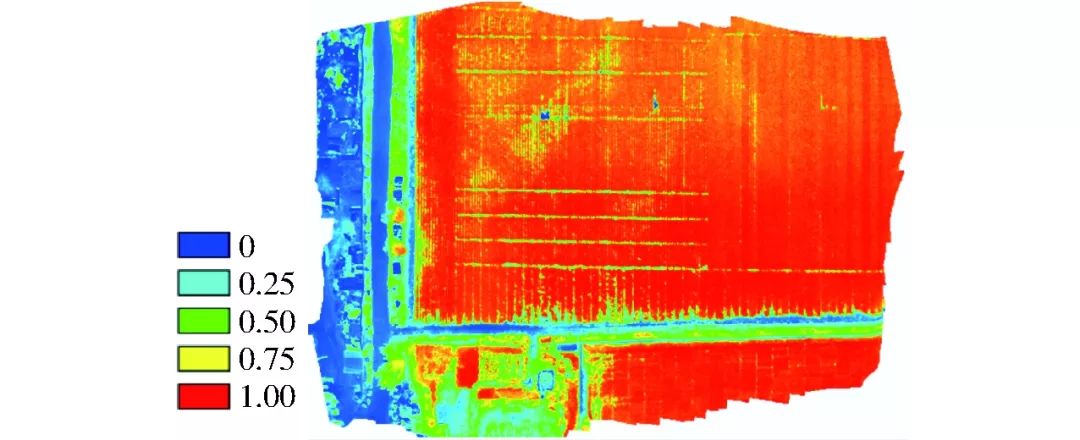
图6 棉田归一化植被指数(NDVI)图
(2017年,新疆维吾尔自治区石河子市)
Fig.6 Normalized difference vegetation index (NDVI)
map of cotton field (2017, Shihezi, Xinjiang)
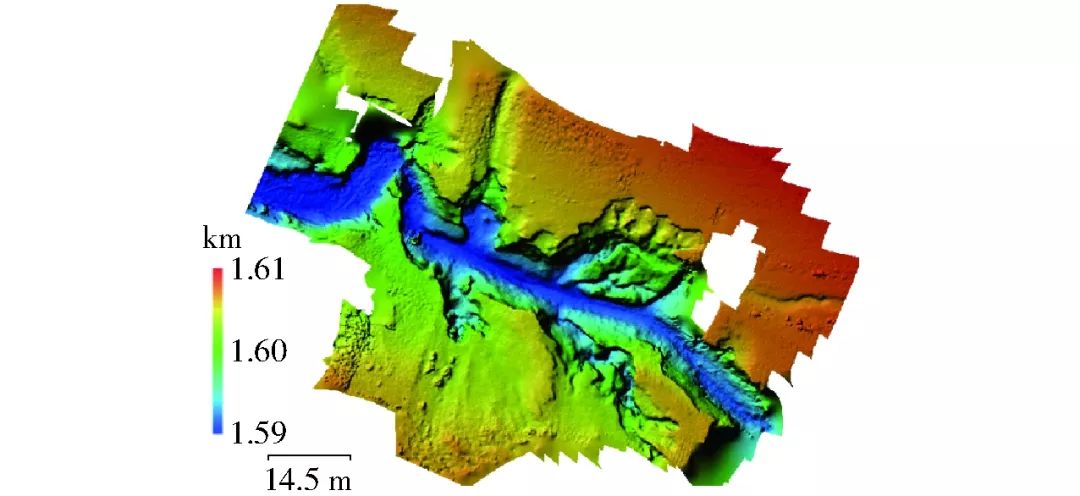
图7 多光谱相机拍摄生成的DSM图像
(2017年,宁夏回族自治区吴忠市)
Fig.7 DSM images generated by multispectral camera
(2017, Wuzhong, Ningxia)
3 小型无人机多光谱遥感应用
低空无人机搭载不同的多光谱载荷获取影像,在中小尺度高精度遥感监测中优势明显,尤其在农业、林业、生态等领域的应用比较广泛。无人机多光谱系统能够在一定程度上改变传统地面人工测量或者调查效率低、时效性差及标准不统一等问题,可为具体应用提供高效决策信息。
3.1 植被长势/营养/胁迫监测
不同植被其氮素、叶绿素、蛋白质和细胞水分等含量各不相同,从而影响植被冠层群体的反射光谱,这为采用光谱遥感方法进行植被生化组分反演提供了理论依据[55]。通过长势/营养监测可及时了解植被的生长状况、水肥病害胁迫及营养状况,便于及时采取各种管理措施, 从而保证植被的正常生长并最大化减少对环境的破坏。
氮素是植被生长的核心元素之一,对作物产量和生产利润影响巨大[55]。LU等[56]利用无人机搭载Mini MCA多光谱相机进行了水稻氮素含量研究,利用红边植被指数(REDVI)实现了最优的氮素估算结果,R2=0.87。BALLESTER等[57]利用无人机搭载RedEdge多光谱相机进行了整个生长季的棉花氮素时空分布研究,结果表明,在生长的早期阶段,对氮素含量进行评价的最佳指标为SCCCI(Simplified canopy chlorophyll content index)指数,而到了生长季的后期,最佳指标是NDRE(Normalized difference red edge index)指数。叶绿素含量是植物生理生化及生态调查中最重要的量测参数之一,它不仅是植物营养状况、光合作用能力和发育阶段的良好指示剂,也是评价植物健康的指标之一。BERNI等[27]利用无人机搭载MCA 6多光谱相机获取橄榄树的多光谱影像,建立基于土壤调节植被指数的叶绿素预测模型,模型拟合决定系数R2=0.89。LU等[58]进行了草地叶绿素含量的监测研究。HERN
多元线性回归、偏最小二乘和逐步线性回归等建模方法在无人机遥感解析植被冠层氮素、叶绿素等生化组分信息时具有广泛的应用[65]。由于波段间反射率有着密切的关系,造成线性模型所需参数的重复,因此目前研究者在遥感反演参数时转向偏最小二乘法、主成分分析、人工神经网络和深度学习等方法,结合高光谱遥感信息,构建包含更多波段的模型,以期更好的解释模型预测的变异。植被长势及营养监测是目前无人机多光谱系统应用最广泛的领域,为精准农业中的作物管理及施肥决策提供了有力的数据采集工具,同时,挑战性在于不同作物类型、不同生长时期的植被长势/营养的预测模型存在普适性问题。
3.2 精细分类与地物识别
精确的土地分类与物种识别对资源管理、调查和运营非常重要[66]。已有研究在利用无人机多光谱数据开展森分制图、树木表型[67]、树种识别[68]、杂草识别[69]、三维几何特征提取[33]等方面都取得了一些成果。FASSNACHT等[70]对遥感在树种识别方面的研究进行了综述,指出利用多光谱相机获取的光谱、纹理及结构信息及其组合可以用于树种的识别。DIAZVARELA等[22]利用无人机多光谱相机获取的光谱信息和DSM信息组合应用于农业梯田的识别,提出的识别方法的精度达到90%以上。MORA等[71]在北极苔原上应用可见光和近红外高分辨率无人机影像进行识别研究,结果表明对苔原植被类型的识别精度达到84%,但是由于种间相似度高,物种个体小,因此无法区分物种。以校准后的多光谱数据为数据源,以现场数据为验证样本,AHMED等[38]应用无人机搭载Parrot Sequoia多光谱相机对安大略省中部试验区的植被种类进行了基于对象的分类准确度评价研究,结果表明,针对5个土地覆盖类型(森林、灌木、草本、裸土和建成区),分类精度高达95%,当分析更详细的植被物种类型(包括个体落叶树种、灌木社区和农作物)时,多光谱数据的分类精度约为89%。GINI等[40]利用两个相机组合(RGB和NIR)进行基于无人机多光谱的树种识别研究,结果表明采用监督分类的物种分类精度为80%。LU等[72]将无人机多光谱引入草地物种组成的时空变化研究,结果表明,无人机获得的多光谱影像具有较高的空间分辨率,是研究小尺度草地物种组成的不可比拟的数据源,总体准确率约为85%。赵庆展等[73]以玛纳斯河畔为研究区,使用固定翼无人机搭载Micro MCA12 Snap多光谱传感器获取高分辨率多光谱影像,提出将光谱特征、纹理特征信息与最佳波段指数结合的方法来确定地物分类最佳波段组合。L
1.2.2 提出循证问题 将系统收集的资料,通过科学分析,结合文献资料,提出循证问题“如何对上消化道出血患者进行健康教育”。
现有研究表明,分类方法主要分为面向对象和面向像素[66]两种,分类和地物识别精度与研究地的生境和植被类型密切相关,生境越复杂,个体越小,种间相似度越高,识别精度越低[10]。相对于传统的调查和监测方法,无人机在可达性和抗干扰性方面表现优越,可以安全高效地获取地物分类数据。
3.3 病虫害监测与分析
病虫害会造成巨大的生产损失,而早期诊断是降低损失的有效途径。植被受到病虫害胁迫后会导致叶片色素及冠层结构的改变[75],特别是叶片叶绿素含量会发生改变,因此对叶绿素含量敏感的光谱特征可用于病虫害遥感诊断中[76]。在植被病害方面,研究主要包括病害指数提取、病害识别、病害时空监测等。刘良云等[77]与罗菊花等[78]利用多时相的高光谱航空图像对冬小麦条锈病进行了监测,提取敏感波段建立病情指数对发病区域及程度进行评价,这些敏感波段可以用于指导病害监测的波段选择。NEBIKER等[24]利用Canon S110 NIR相机获取NDVI指数,对马铃薯和洋葱栽培中的植物病害检测进行了定性研究,用于确定病害的原始侵染地点、病害的防治效果以及病害的发生模式等。YANG等[79]利用高分辨率多光谱和高光谱航空影像数据提取了棉花根腐病的发生范围,结果显示这两类数据监测结果的精度差别并不显著,表明多光谱数据具有大范围病害监测的应用潜力。CALDER
3.4 区域高精度叶面积指数提取
叶面积指数(LAI)指单位土地面积上植物叶片总面积占土地面积的比例,它是表征作物几何结构的关键生理物理参数,与光合作用、蒸腾作用、碳循环等生物物理过程密切相关。LELONE等[23]将改造的多光谱相机搭载在电动固定翼无人机上,对法国西南部小麦实验田进行监测,基于获取的可见光-近红外波段的多光谱影像分析了植被指数(NDVI、GNDVI)与生物物理参数(LAI、氮吸收量)之间的联系,相关系数达到0.82以上。采用类似的硬件方案,LU等[58]对草地的LAI提取进行了研究。杨贵军等[45]利用电动六旋翼无人机搭载ADC Lite多光谱相机获取了小麦的多光谱数据,经波段计算提取归一化植被指数NDVI、土壤调节植被指数 OSAVI、氮素反射指数 NRI等与作物生长状态敏感的多种植被指数,利用LAI-2000型叶面积指数仪获取地面实测数据,结果表明 NDVI 与作物 LAI 相关性最大,其模型验证R2为0.48,均方根误差为0.27。高林等[43]以大豆为研究对象,分析了多源遥感数据对叶面积指数的估测精度,通过构建植被指数与地面实测LAI数据的经验回归模型表明,针对星、机、地3类遥感信息源,地面高光谱数据在反演LAI方面较传统多光谱数据有优势但不突出,在保证获得高精度大豆LAI预测值和高工作效率的前提条件下,基于无人机遥感的多光谱获取技术为最佳试验方案。KALISPERAKIS等[85]利用无人机高光谱相机提取的窄波段NDVI来反演叶面积指数,其相关性为84%。TIAN等[86]利用无人机搭载RedEdge多光谱相机对红树林叶面积指数进行了研究,提出了Scaled NDVI指数来预测植被指数,其精度较高(R2=0.817),相比WorldView-2卫星数据的反演结果,无人机多光谱数据可有效消除背景影响且分辨率更高,因此在长势均匀或者较低LAI的样方里面应用效果更好。BERNI等[27]利用MCA 6多光谱相机获取橄榄树的多光谱影像建立LAI预测模型,决定系数达到R2=0.88。
4)在一定的工程边界条件及设计原则下,新方案饱和烟气的加热功率要比常规方案小10.511 6 MW,此部分热量可用于预热冷风,折算为机组增加的发电功率2.185 4 MW,新方案可利用的饱和烟气余热功率为10.570 4 MW,在考虑烟气余热用于凝结水系统和不考虑烟气余热用于凝结水系统两种情况下,机组效率分别增加0.231%、0.164%,节能效果更好。
大量研究表明,背景和植被类型的影响是制约植被反演精度的2个关键因素[86-87]。现有基于无人机多光谱遥感提取作物叶面积指数的研究大都是通过植被指数与实测LAI建立经验模型实现,或者基于辐射传输模型和光谱数据[88]来建立机理模型实现 。其在研究对象的选择上往往具有背景均匀、植被类型单一的特征。然而,大多数的复杂生态系统中,如沿海红树林,很可能是背景复杂,植被类型多样,故叶面积指数提取的难度也较大。
3.5 区域高精度植被覆盖度提取
植被覆盖度(FVC)通常定义为统计范围内植被的垂直投影面积所占的百分比,它能够直观地反映植被的生长状况,是指示生态环境变化的重要指标之一[89]。利用低空高分辨率实测数据作为样本的实测数据源是植被覆盖度遥感反演的发展趋势,多光谱相机提取的EVI或者NDVI指数等作为模型的输入因子,取得了较好结果。刘峰等[13]利用汽油无人直升机搭载ADC Air多光谱相机,对板栗覆盖度进行了研究,基于植被土壤光谱差异,提出了无人机多光谱植被覆盖度的快速计算方法,进而利用多时相的无人机多光谱遥感影像实现了植被覆盖度年度变化监测。李冰等[5]设计了一套以无人机为平台的低空多光谱载荷观测系统,对冬小麦覆盖度变化进行监测。周在明等[90]利用四旋翼无人机搭载ADC Air相机对滩涂湿地入侵物种互花米草的植被覆盖度进行了研究,通过NDVI指数模型获取多光谱植被覆盖度信息,以高精度可见光影像为真值进行验证。结果表明NDVI模型估算值与真实值之间的决定系数为0.92,具有较好的一致性。相比目前广泛应用的无人机可见光图像[91-92],利用无人机多光谱图像反演植被覆盖度时图像的空间分辨率要求较低[90],CHAPMAN等[12]利用最优线性无偏预测方法获取的高粱植被覆盖度与地面真实数据的决定系数为 0.88。
目前的研究中,主要是通过计算机视觉方法或植被指数建模反演等方法获得作物的冠层覆盖度信息。今后研究中还需要探索更普适性方法实现不同植被覆盖度的准确提取。
3.6 田块尺度的作物估产
遥感估产是基于作物特有的波谱反射特征,利用遥感手段对作物产量进行监测预报的一种技术。利用影像的光谱信息可以反演作物的生长信息,通过建立生长信息与产量间的关联模型,便可预估作物产量。在实际工作中,基于遥感手段构建产量预测模型所使用的参数包括生育期长度、叶绿素含量、叶面积指数、生物量、光谱反射率和植被指数等。
基于作物特有的波谱反射特征,通过构建包含多种植被指数的遥感反演模型,可以实现作物产量的预测[93]。PE
从目前的文献看,NDVI植被指数在产量预测中发挥着重要的作用。利用无人机多光谱系统获取多光谱图像来预测作物产量时,具有成本低、天气影响小、拍摄时间宽裕、对图像分辨率不敏感的优点。由于可以在合适的生育期对作物产量进行预测,可以在收获前对某些问题进行提前诊断,提前实施相应的精准农业操作,从而获得更好的经济及环境效益[88]。融合农学知识、作物生长模型与遥感指标构建精度高、通用性强的产量预测模型,对应用无人机遥感进行作物产量预测至关重要[99]。
3.7 生物量估算
生物量是指某一时刻单位面积内实存生活的有机物质(干重)总量。生物量是生态系统结构优劣和功能高低的最直接的表现,是生态系统环境质量的综合体现。同时,生物量的定量估算为碳循环研究提供了重要的参考。杨鹏万等[100]利用藏北高寒草甸地上生物量和ADC便携式多光谱相机数据,建立了植被指数估算藏北高寒草甸地上生物量的模型。在分析了地上生物量与归一化植被指数NDVI、归一化绿波段差值植被指数GNDVI和土壤调节植被指数SAVI相关关系的基础上,构建了地上生物量和各植被指数的7种模型,并对拟合效果比较好的模型进行了精度检验。结果表明3个植被指数中NDVI的模拟效果最好, GNDVI最差;所有模型中,以NDVI为自变量的线性模型、以SAVI为自变量的线性模型和幂函数模型模拟和预测效果都很好。在VEGA等[88]对向日葵生物量的研究中,也表明利用多光谱相机的DN值计算的归一化植被指数NDVI与生物量具有很好的线性关系。生物量是作物表型的一个重要参数,AICH等[101]提出了一套基于深度学习的估算方法,并将无人机多光谱数据用于小麦生物量估算中,获得较高的估算精度。
在今后的研究中将高精度的DSM数据与光谱数据相结合,利用获取的植被结构信息进行辅助,有可能提高生物量估算的精度。
3.8 群落调查及生物多样性评价
生物多样性是一个描述自然界多样性程度的内容广泛的概念,是生物及其环境形成的生态复合体以及与此相关的各种生态过程的综合。BOON等[102]在南非利用固定翼无人机搭载RedEdge多光谱相机用于湿地植被完整性的调查和生态系统制图,结果可以用于湿地扰动等级、面积的精确评价。MINA

尽管不能完全代替现场人工调查,无人机遥感系统可以在群落尺度上进行生物多样性评估,凭借其速度快、可到达性强的优势可以显著提高群落调查的面积和效率,从而节约大量的人力物力。
3.9 高通量作物表型研究
植物表型是受基因和环境因素决定或影响的, 反映植物结构及组成、植物生长发育过程及结果的全部物理、生理、生化特征和性状。作物表型信息是揭示作物生长发育规律、环境与管理措施等关系的重要依据[104]。传统的表型组学的研究技术和方法仍然停留在使用传统的测量仪器、数字图像分析[105]等方法阶段,田间试验取样测定作物性状参数的方法耗时耗力,且空间覆盖有限,成为当前农学、育种等作物科学研究的发展瓶颈,而以无人机为代表的近地遥感高通量表型平台凭借机动灵活、成本低、空间覆盖广的优势成为获取田间作物表型信息的重要手段[6,99]。
现有研究表明,无人机多光谱遥感系统中的可见光相机可以用于花期[106]、株高[107]、倒伏[108]、植被覆盖度[12]等结构与形态相关参数的获取,而多光谱相机可以用于叶面积指数[43,109]、生物量[101]、产量[96]、出苗率[101]、返青率[110]、氮素含量[57]、叶绿素含量[111]等参数的获取,红外波段的相机可以用于冠层温度[28]等胁迫指标参数的获取。具体地,WATANABE等[112]利用无人机多光谱系统进行了高粱株高的测量,测量值输入基因预测模型后,获取的预测值与真实值的相关系数为0.84。DUAN等[96]利用无人机搭载RedEdge多光谱相机,构建了一套以测量地块尺度NDVI指数为主的高通量作物表型平台,用于监测小麦的农学和育种特性,获取的飞行数据与手持设备测量的地面NDVI数据具有高度的相关性,可以实现快速、有效的NDVI数据获取,并且产量与NDVI的决定系数达到0.82。ZAMANALLAH等[55]利用固定翼无人机搭载ADC-lite多光谱相机用来研究玉米在缺氮胁迫/衰老下的长势空间变异特征,并利用无人机多光谱的NDVI数据进行产量预测。G
高通量的作物表型平台可应用于农学、植物生理和育种研究,用于探讨基因、环境和管理措施之间复杂的相互作用。在未来的无人机遥感解析作物表型信息研究应用中,需深入挖掘高光谱、LiDAR等传感器信息,融合多传感器的数据构建通用性强、精度高的作物表型信息解析模型。
3.10 其他应用
无人机多光谱遥感还可以提供一种快速、定量、高效的作物灾害损失评估方法,如ZHOU等[114]将无人机多光谱应用于马铃薯冰雹灾害评估中,研究表明土壤调节植被指数对冰雹灾害最为敏感。此外,无人机多光谱遥感还应用于自然遗产保护[115]、物候监测[116] 、灌溉设施识别[117]等研究中。
4 讨论与建议
无人机多光谱遥感技术虽然近来年得到了广泛的发展,但尚存在以下问题,需要在后续的无人机多光谱遥感中重点关注和解决,具体包括:
(1)无人机大面积作业续航时间受限问题。无人机航拍覆盖范围比地面测量广,与卫星资料的空间匹配度更高,无人机方法是对目前地面实测方法的巨大改进,可以高效、便捷地获取更大空间范围的地面观测资料,从而克服传统地表调查方法与卫星数据的空间匹配性问题,提高遥感反演的精度[92]。但是,目前电动无人机普遍存在航时较短的问题,一次路径规划无法实现大面积的信息获取,并且对环境要求比较高,难以适应复杂的地势环境,通信信号易受干扰,因此,大区域的应用还受到限制。
(2)无人机影像的几何和辐射校正问题。目前大多数无人机多光谱影像分辨率较低,特征点匹配难度大,几何校正效率和精度有待提高。多光谱传感器在无人机飞行过程中受飞行稳定性及光照环境变化影响,不同时刻采集的数据出现辐射非均一性,对图像进行辐射校正的方法一般为半手工方式,操作较为复杂。为此,后续应用过程中必须研究针对所有数据的辐射校正算法,消除辐射非均一性对后续参量估算的影响。而且,目前的数据解析往往通过地面实测数据建立经验回归模型,模型受作物种植区域、作物类型以及作物生育期等影响较大,后续需利用多种作物观测数据建立通用性模型,并保证模型解析精度满足实际需求。建议在今后研究中,着重加强辐射校准的研究,探索通用性辐射校准方法,减少对地面定标的需求,提供具有更加准确辐射信息或者反射率信息的多光谱图像,为提高后续应用的精度奠定基础。
(3)无人机多光谱载荷和传感器波段受限问题。目前的多光谱相机具有波段数目有限(小于12),波段宽度比较宽(大于10 nm)的特点,这导致不能准确捕获植被在某些敏感波段的精细反应,不能满足精细分类或者探测的需要[40]。随着技术发展,无人机高光谱传感器在体积、重量上越来越小,数据传输及处理也逐渐成熟,有可能会更加普及[118]。本文中无人机载荷聚焦于小型的多光谱相机,但是在面向具体的应用时,要根据需求提出最优的载荷配置方案,微型高光谱仪[119]、成像高光谱仪[120]、紫外相机、热红外相机[29]等都具有各自独特的优势及应用价值。
(4)无人机多光谱遥感的尺度效应问题。由于地表空间异质性的普遍存在,任何非线性遥感模型反演产品都存在尺度效应问题[43]。CURRAN等[121]研究了样方大小对地表实测草地遥感反演结果的影响,证明样方尺寸是影响测量精度的重要因素。因此在将无人机数据与卫星数据、地面数据[122]建立模型时,需要将尺度问题考虑在内。建议各行业部门的专业人员与遥感、计算机科学等领域的专家密切合作,制订无人机多光谱遥感技术的相关标准和规范,共同开发推进并普及无人机多光谱遥感技术。
参考文献
1 童庆禧, 田国良, 茅亚澜. 多光谱遥感波段选择方法的研究[J]. 宇航学报, 1983, 4(2): 4-16.
2 王斌永, 舒嵘, 贾建军,等. 无人机载小型多光谱成像仪的设计[J]. 光学与光电技术, 2004,2(2):18-20.
WANG Binyong, SHU Rong, JIA Jianjun, et al. Design of compact multispectral imager for UAV[J]. Optics & Optoelectronic Technology, 2004,2(2): 18-20. (in Chinese)
3 廖小罕, 周成虎. 轻小型无人机遥感发展报告[M]. 北京: 科学出版社, 2016.
4 MARRIS, EMMA. Drones in science: fly, and bring me data [J]. Nature, 2013, 498(7453): 156.
5 李冰, 刘镕源, 刘素红, 等. 基于低空无人机遥感的冬小麦覆盖度变化监测 [J]. 农业工程学报, 2012, 28(13): 160-165.
LI Bing, LIU Rongyuan, LIU Suhong, et al. Monitoring vegetation coverage variation of winter wheat by low-altitude UAV remote sensing system[J]. Transactions of the CSAE, 2012(13): 160-165. (in Chinese)
6 YANG G, LIU J, ZHAO C, et al. Unmanned aerial vehicle remote sensing for field-based crop phenotyping: current status and perspectives[J]. Frontiers in Plant Science, 2017, 8:1111.
7 SANKARAN S, KHOT L R, ESPINOZA C Z, et al. Low-altitude, high-resolution aerial imaging systems for row and field crop phenotyping: a review [J]. European Journal of Agronomy, 2015, 70:112-123.
8 ZHANG C, KOVACS J M. The application of small unmanned aerial systems for precision agriculture: a review [J]. Precision Agriculture, 2012, 13(6): 693-712.
9 杨海军, 李营, 朱海涛, 等. 无人机遥感技术在环境保护领域的应用 [J]. 高技术通讯, 2015, 25(6): 607-613.
YANG H J, LI Y, ZHU H T, et al.UAV remote sensing’s applications in the environmental protection field [J]. Chinese High Technology Letters, 2015, 25(6): 607-613. (in Chinese)
10 孙中宇, 陈燕乔, 杨龙, 等. 轻小型无人机低空遥感及其在生态学中的应用进展 [J]. 应用生态学报, 2017, 28(2): 528-536.
SUN Z Y, CHEN Y Q, YANG L, et al. Small unmanned aerial vehicles for low-altitude remote sensing and its application progress in ecology[J]. Chinese Journal of Applied Ecology, 2017, 28(2): 528-536. (in Chinese)
11 GAGO J, DOUTHE C, COOPMAN R E, et al. UAVs challenge to assess water stress for sustainable agriculture [J]. Agricultural Water Management, 2015, 153(Supp.C): 9-19.
12 CHAPMAN S C, CHAN A, JACKWAY P, et al. Pheno-copter: a low-altitude, autonomous remote-sensing robotic helicopter for high-throughput field-based phenotyping [J]. Agronomy, 2014, 4(2): 279-301.
13 刘峰, 刘素红, 向阳. 园地植被覆盖度的无人机遥感监测研究 [J/OL]. 农业机械学报, 2014, 45(11): 250-257.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20141139&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2014.11.039.
LIU Feng,LIU Suhong,XIANG Yang.Study on monitoring fractional vegetation cover of garden plots by unmanned aerial vehicles[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(11):250-257. (in Chinese)
14 LINK J, SENNER D, CLAUPEIN W. Developing and evaluating an aerial sensor platform (ASP) to collect multispectral data for deriving management decisions in precision farming [J]. Computers & Electronics in Agriculture, 2013, 94(11): 20-28.
往期热文(点击文章标题即可直接阅读):