【SIGIR2020-清华】知识图谱上的增强推荐推理

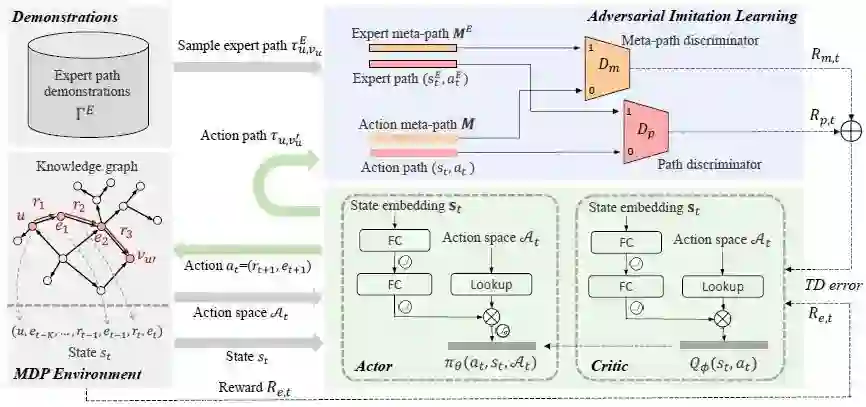
知识图谱被广泛用于提高推荐准确度。知识图谱上的多跳用户-物品连接还提供了关于为什么推荐某个项的推理。然而,路径推理是一个复杂的组合优化问题。传统的推荐方法通常采用蛮力方法来寻找可行路径,这导致了与可解释性和收敛性相关的问题。在本文中,我们通过更好地监督寻路过程来解决这些问题。关键思想是用最小的标记努力提取不完美的路径演示,并有效地利用这些演示来指导寻路。特别地,我们设计了一个基于演示的知识图推理框架用于可解释推荐。我们还提出了一个反面的actor批评家(ADAC)模型用于演示导向的寻路。在三个真实基准上的实验表明,我们的方法比最先进的基准更快地收敛,并且具有更好的推荐精度和可解释性。
https://www.microsoft.com/en-us/research/publication/leveraging-demonstrations-for-reinforcement-recommendation-reasoning-over-knowledge-graphs/
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“R3KG” 可以获取《知识图谱上的增强推荐推理》专知下载链接索引



登录查看更多
相关内容
Arxiv
11+阅读 · 2018年5月9日





相关VIP内容
相关资讯
相关论文
Arxiv
11+阅读 · 2018年5月9日