日本研发极速奔跑腿足机器人相当人类20km/h,通过失去平衡达到最大速度
我们见过很多双足机器人,从波士顿动力的“Atlas”到本田公司的 “ASIMO”,研究人员都在竭尽全力让这些人形机器人学会更多的本领,以便它们以后能真正从实验室走进人们的生活。但说来也好笑,很多的机器人厂商,在开发机器人时,可能还停留在让这些机器人在完成相应动作时,如何重心稳定,不至于摔倒。
和这些人形机器人的研究机构相反,来自日本的石川正俊教授正在做着不一样的尝试,他认为想要让人形机器人达到和人一样的行走和奔跑性能,就应该学习人类奔跑时的动作——先让身体失去平衡。于是他带领自己东京大学情报理工学系研究生院的团队,研发了一款致力于奔跑的高速双足机器人“Achires”。

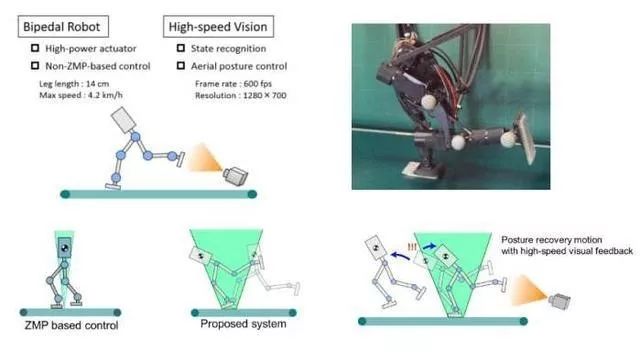
这只机器人由金属制成,腿长只有14厘米,而且目前只有从腰部到腿部的部分,上半身貌似还没有设计出来。但是别小看这只其貌不扬的小机器人,它的奔跑时速可达4.2公里,如果换算成腿长70~80厘米的成年人,时速可达20公里,是一个名副其实的“马拉松运动员”,并实现了至目前为止双足机器人无法达到的灵活度。

跑起来看不见腿
传统的双足步行机器人,大多通过安装在机器人脚底的传感器来感应地面的状况,这使得它们智能采取直立的姿态缓慢行走。而Achires机器人的研发,主要集中在了传感器、高速图像处理和机器人等领域。它通过安装在机器人外部的高速摄像机组成视觉反馈系统,以此来控制机器人行走动作的进行。
慢动作,跑起来是不是很像人
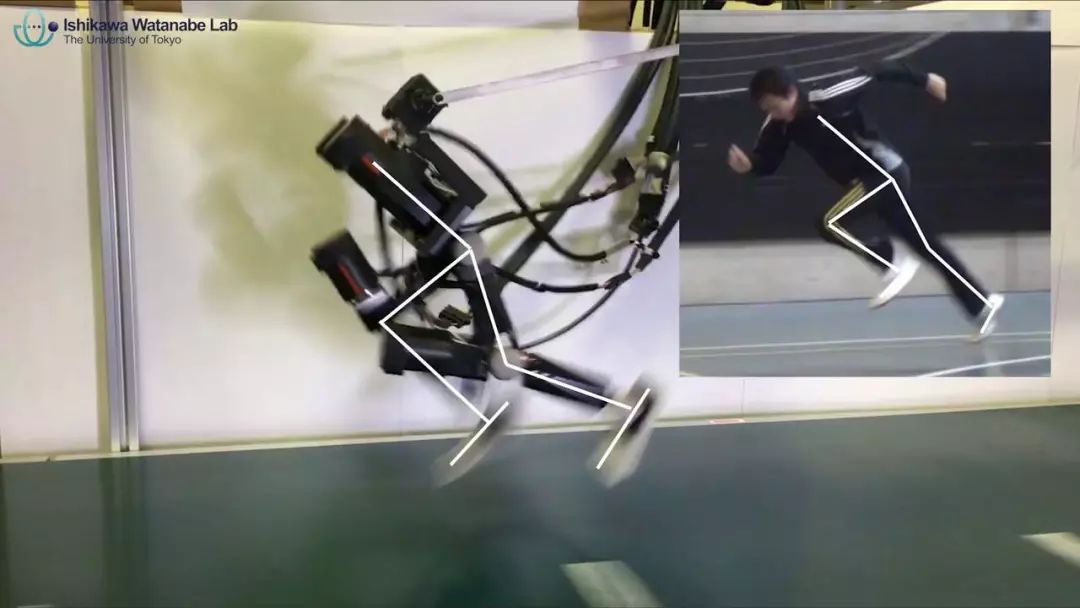
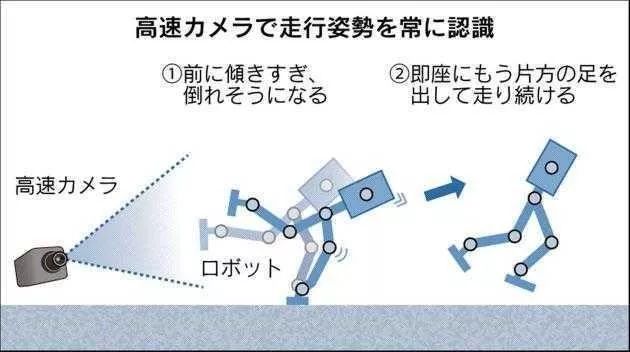
高速摄像机会以每秒600张的速度拍摄机器人状态和行走的姿态,以此指导和监控机器人在行走和奔跑过程中的稳定性,当行走姿态稍有不对,系统就会对机器人发出指示,让其向人来一样快速伸出另一只脚,以便能够以看似不稳定的前倾姿势快速奔跑。
此外在马达方面,通过调整马达线圈的缠绕方式,研究人员研发出了一种能够瞬间产生强大力量的小型马达。利用这款马达,机器人可以实现用力蹬地加速,然后在空中快速调整为落地姿态。
其实,早在2014年的时候,石川教授便已经开发出了这款机器人的原型,但当时高速视觉反馈系统还不成熟,只有机器人双腿离地时才能获取的姿势信息,而现在,视觉反馈几乎已经可以应用到机器人行走的所有过程中,使得机器人能更好更快的行走。
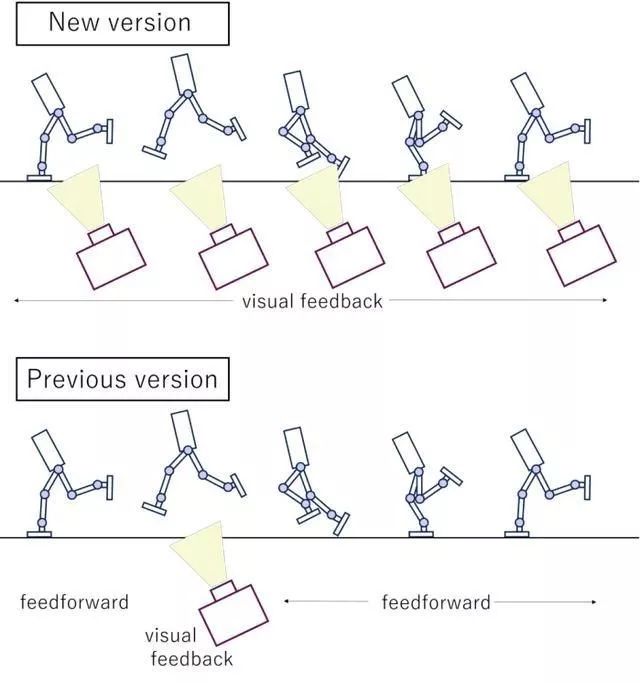
随着科技的进步,高速视觉反馈系统已日趋成熟,ACHIRES双足机器人的稳定性也得到了很大提高。另外,石川教授透露他将进一步改进该机器人,争取将摄像头移入到机器人体内,简化整个系统,并使机器人在未来3-5年具备实际应用价值。
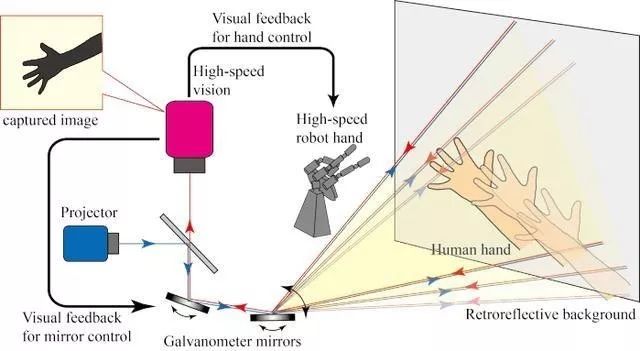
对于石川教授的这款跑步机器人,可能很多人并不是很了解。但说到他的另一个代表作——猜拳机器人可能大家就不陌生了。

就是那个和人类猜拳永远都能赢过人类的奇葩机器人。其原理也是运用了高速视觉反馈系统,它会比人类晚一瞬间出拳,通过分析人类的出拳手势,选择正确的手势赢得比赛。而晚的那一瞬间以人的视力是根本识别不出来的。
总之,这种运用高速视觉反馈系统来快速调整机器人动作的想法还是很有新意的,也期待这样一款从仿生意义上来说更接近人类的机器人快点应用于现实。最后看一下完整视频,欣赏一下这位新晋马拉松运动员的风姿吧。
长按识别图中二维码关注我们!






