"蜘蛛精"全地形六足机器人HEXA功能全解析,打造机器人学习开发平台

还记得这个超萌的“大蜘蛛”——全地形六足机器人HEXA吗?

自从它华丽亮相,包揽多项大奖之后,
开发者和机器人爱好者们就从它身上研究出了不少新奇好玩的应用和玩法!
实现了一个又一个的脑洞。
尬舞
▼

爬楼梯
▼

适应复杂地形,科技感满满.
▼

因为HEXA可以一键连接手机,进行可视化操控。
▼

所以这些都可以通过APP轻松完成,
▼

如此灵活的行动力源于它每只脚上有三个舵机,
全身共计19个自由度,
头部支持360度无限旋转,
跨步、正常、探洞三种步态可自由切换,
全地形适应能力满分~
HEXA不仅可以轻易在复杂地形保持平衡并行走,
还能够以1.2Km/h速度跑步!
还可以攀爬高达15cm的障碍!

此外,HEXA还内置丰富的传感器,
在它的头部“眼睛”位置,搭载了支持夜视功能的高清摄像头
以及测距传感器、红外发射器,
让HEXA能够敏锐地与周围世界进行交互,
也给后续对它编程实现各种复杂功能提供了底层支撑。

如果创客们觉得官方自带的传感器不够满足开发脑洞,
HEXA也提供了丰富的硬件开发接口(I²C,ADC,GPIO,USB,音频接口等),
能够让用户自由发挥想象空间。
扩展更多外设来DIY一些更复杂的功能。
HEXA的可编程特点体现在两个方面,首先是硬件层面。

此外,HEXA的外观设计也可以自行DIY,
可以通过3D打印更换外壳,
还可以给HEXA进行变装,
此前有国外用户将HEXA做成《攻壳机动队》里的塔奇克马。
HEXA的另一个可编程的特点体现在软件层面。
Vincross专门为HEXA打造了面向机器人开发者的专属操作系统,
从易用性的角度来说,
HEXA确实做得不错,
没有任何基础的小朋友,
也可以轻松上手。

当然,HEXA不仅仅只是一个让小朋友玩的机器人玩具,
定位于可编程的它,
更重要的是给想研究机器人科学的创客们,
提供一个机器人学习和开发的平台。
对于初级的开发者,
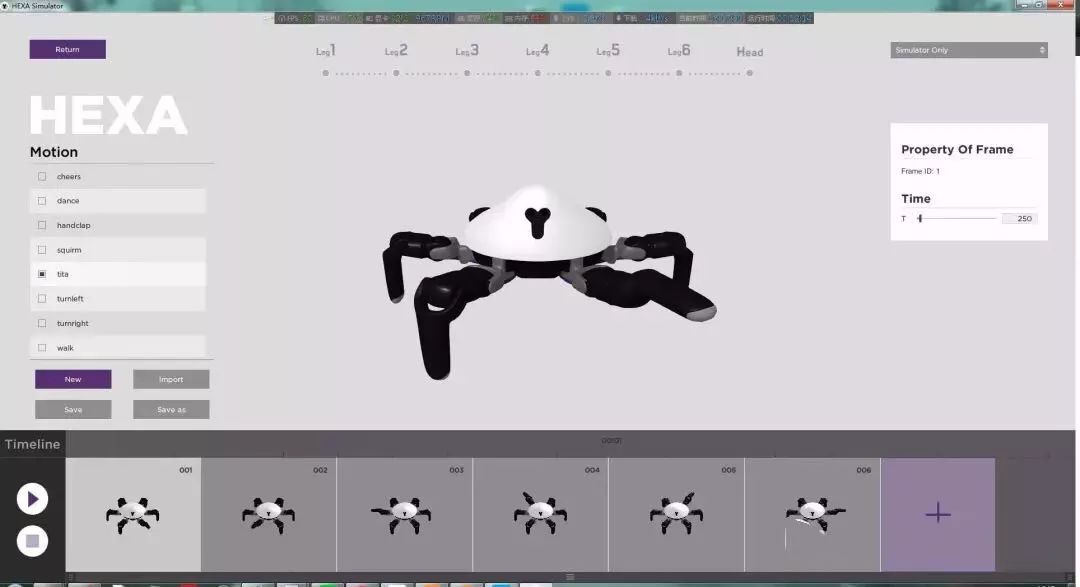
首先可以使用HEXA Simulater来进行入门学习。
在Simulator中,可以通过可视化的3D模拟器,
让开发者不用编写代码就可以直观地进行动作设计。
设计好的动作可以直接写入HEXA的硬件中,
轻松实现想要的功能。
当然,对于有编程基础的创客来说,
HEXA也能够满足他们的机器人开发需求。
HEXA搭载的是基于Linux内核定制优化的MIND OS操作系统。
这个机器人操作系统其实类似智能手机里的iOS或者Android。
创客可以通过这个系统,使用GO语言,
进行更为深度的开发

例如,有开发者利用计算机视觉算法训练HEXA的图像识别系统发现红色物体,
并用运动算法控制机器人的移动,
实现了斗牛效果
▼

让HEXA秒变快递小哥的操作:
▼
还可以让HEXA的六只脚一起上阵抢红包:
▼
在完成相应的开发之后,
创客可以将动作封装成机器人应用,
HEXA还提供了专门的Skill Store,
类似于App Store,
开发者不仅可以将自己创建的Skill上传到Skill Store上进行分享和售卖,
其他的HEXA玩家也可以自行前往下载里面的应用,
增加HEXA的功能。
这样的“蜘蛛精”机器人你想来一个吗?


①工业
②服务
③特种
俄罗斯人形机器人 FEDOR丨美国重型机械 Guardian GT
波士顿动Atlas 360度后空翻丨中国四足机器人 Laikago
④仿生
意向合作,文章转载, 均可联系堂博士
商务合作:13810423387(同微信)
内容合作:15611695072(同微信)