【前沿技术】美国DARPA“分布式作战管理”项目取得阶段性成果
点击上方“公众号”可以订阅哦!
2018 年2 月,BAE 系统公司首次披露“分布式作战管理”项目7 次飞行测试情况,测试验证了作战辅助决策软件在有人-无人机编队协同作战中的应用。
一、项目概况
有人-无人机编队作战是美军未来“体系作战”构想的关键组成部分,但在强对抗环境下,卫星通信和战术数据链可能降效或失效,致使编队协同作战存在较大的不确定性。为此,DARPA 于2014 年2 月发布“分布式作战管理”(DBM)项目跨部门公告,开发可辅助机载战斗管理人员及飞行员管理空对空、空对地作战任务的作战辅助决策软件,确保有人-无人机编队在不能持续稳定通信情况下继续执行作战任务。
DBM 项目涉及系统集成和技术开发两大主要技术领域,在项目两个阶段中并行推进。
第一阶段为期14 个月,聚焦规划和控制、态势感知等。分布式规划与控制方面,将根据机型(指控飞机、战术飞机、无人机)、通信环境、既定任务、敌我力量等制定任务优先级协议。例如,当指控飞机、战术飞机无法通信时,由无人机承担作战任务。分布式态势感知方面,将开发信息管理系统,以评估信息优先级,并将高优先级信息发送至其他平台。人机交互方面,将识别战斗管理人员及飞行员在空对空、空对地作战任务中的具体决策、工作量等。

图1 “分布式战斗管理”项目概念
第二阶段为期30 个月,重点开展系统集成和在虚拟/真实环境下的演示验证。演示验证方面,将构建作战场景和具体作战任务,在虚拟和真实环境下分别开展一次演示验证。软件架构方面,将开发开放式标准,允许集成至各型飞机。人机交互方面,将利用现有的显示器等硬件,使战斗管理人员及飞行员快速理解态势,并有效管理杀伤链。
2015 年初,DARPA 授予BAE 系统公司、洛马公司、查尔斯河分析公司DBM 项目第一阶段合同。
2016 年4~5 月,美国空军研究实验室代表DARPA授出DBM项目第二阶段合同,其中,BAE系统公司获得879 万美元资助,开发基于“网络对抗环境态势理解系统”(Consensus)和“反介入实时任务管理系统”(ARMS)两款软件的分布式作战管理系统,并分别在虚拟和真实环境下的开展测试评估;洛马公司获得1617万美元资助,为分布式作战管理系统提供软硬件等。
二、飞行测试情况
2017 年9 月,DARPA 联合空军研究实验室开展了7次、为期11 天的飞行测试(2018 年2 月首次披露),采用“利尔”喷气公务机充当无人机,采用地面模拟机充当有人机,各平台均装配了BAE 系统公司的“网络对抗环境态势理解系统”和“反介入实时任务管理系统”两款软件,该两款软件是实现作战辅助决策的核心。测试中,处于地面的有人机最先加载作战任务,相关软件将任务分解,部分任务被分配至试验空域内的无人机;当通信意外中断(事后查明,太阳耀斑造成通信中断)后,有人机、无人机按照预先设定继续执行任务。本次飞行测试验证了作战辅助决策软件的半自主性能,及其在空对空作战中的应用。2018 年夏季,将开展空对地作战演示验证。
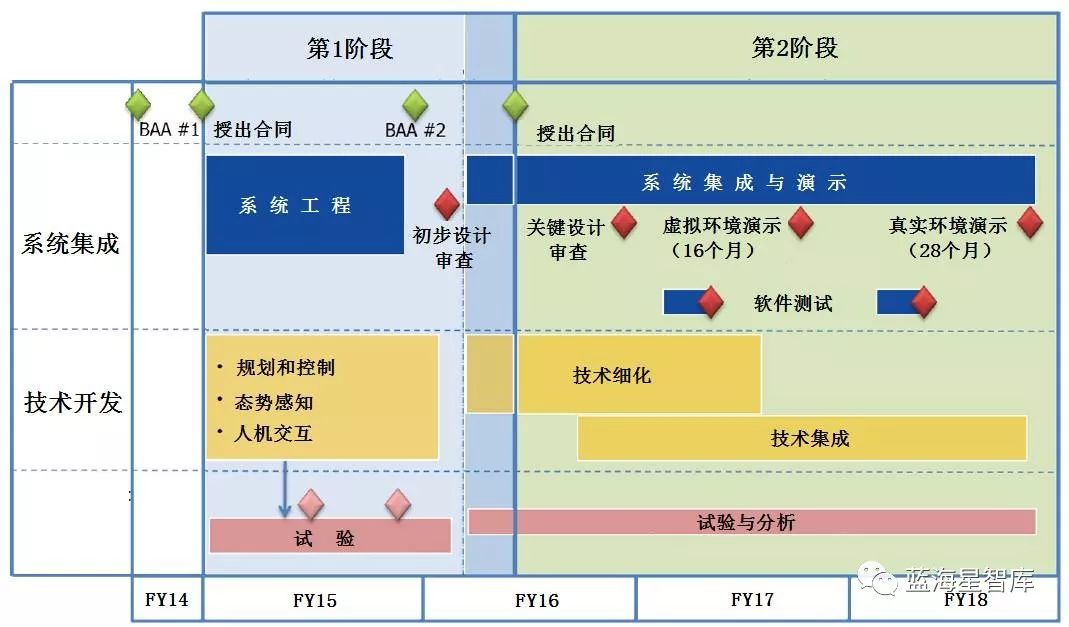
图2 “分布式作战管理”项目组织方式
(1)网络对抗环境态势理解系统
该系统基于“全源追踪与识别融合”(ATIF)技术开发,可融合源自移动目标指示器(MTI )、图像情报(IMINT)、信号情报(SIGINT)等的信息,最终形成通用作战态势图。ATIF技术具备两大优势:一是可确保目标追踪的连续性,减少碎片化信息;二是提升了态势感知能力,即通过信息关联、多渠道确保信息的准确性。
(2)反介入实时任务管理系统
该系统基于“多平台任务控制系统”(M2CS)技术开发,结合通用作战态势图,为各平台规划、分配和控制作战任务。在任务规划方面,软件充分考虑了任务意图、时间、空间和自主能力等;在控制方面,软件支持对航电系统的集中或分散控制。

图3 参与首次飞行测试的地面模拟机
三、结语
近年来,美国主要对手快速推进武器装备现代化建设,而自身武器装备研发又陷入“拖(周期)、降(性能)、涨(成本)”困境,对作战优势构成挑战。为此,DARPA 积极探索分布式空战体系,通过在作战空域整合预警平台、战术飞机、空中发射/回收平台、无人机、导弹、炸弹、电子战吊舱等多型武器装备,分散执行作战任务,实现快速升级、随时入网、实时替换。
2014 年,DARPA 启动“体系综合技术及试验”(SoSITE)项目,聚焦发展分布式空战概念、架构和技术集成工具,目标是将有人战斗机的能力分散至大量具备某一项或某些能力的
无人机平台上,并实现平台间实时数据共享、多机组网和协同作战,以及不同任务载荷的即插即用,最终形成分布式空战体系。项目预计2019 年10 月完成。可见,DBM 实质上可认为是DARPA 探索分布式空战体系的支撑项目之一。
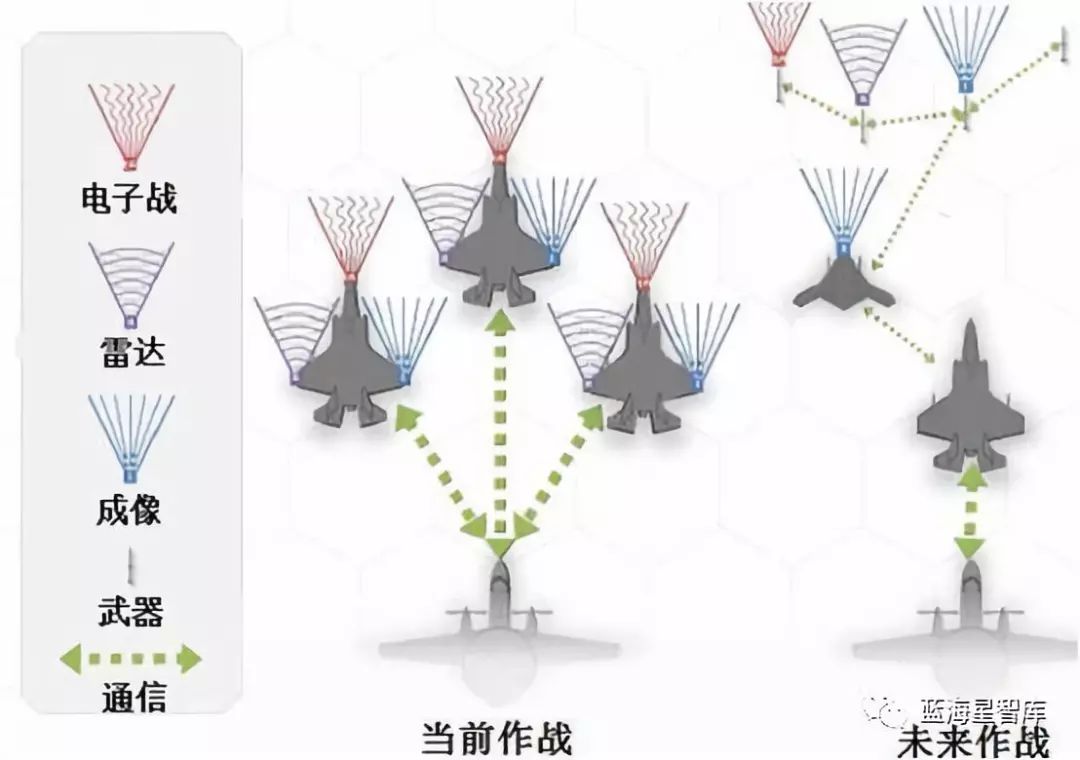
图4 SoSITE 项目概念图
综上,围绕分布式空战,DARPA已在作战管理、体系架构等领域开展了先期研究,正加快推进相关概念的演示验证,有望在2020 年代取得突破。分布式空战强调多型单一任务类型的武器装备的协同作战能力,不再单纯依赖高新复杂装备,可能对未来的空战装备体系和作战模式产生重要影响。
蓝海星:孙明月 于宪钊
注:投稿请电邮至124239956@qq.com ,合作 或 加入未来产业促进会请加:www13923462501 微信号或者扫描下面二维码:

文章版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将删除内容或协商版权问题!联系QQ:124239956





