深度学习入门笔记
编者按:开发者randomekek基于Ian Goodfellow《深度学习》(Deep Learing,“花书”)所做的笔记,供初学者大概了解深度学习包括哪些内容,或快速温习深度学习方面的知识,找到进一步学习的主题。
机器学习
机器学习(machine learning)是统计学的一个分支,使用样本逼近(approximate)函数。
我们有一个真底层函数或分布(distribution)生成了数据,但我们不知道它具体是什么。
我们可以在从训练数据中抽取的样本上尝试不同的函数。
图片标注的例子:
函数:f*(图像) -> 描述
样本:数据 ∈(图像, 描述)
注意:由于存在许多合理的描述,描述是文本空间中的分布:描述 ~ 文本
机器学习的目标是找到满足以下条件的模型:
具有充分的表示能力以高度逼近真函数
具备使用训练数据寻找函数逼近的高效算法
逼近需要具有概括性,在未见(unseen)输入上能返回好的输出
机器学习的可能应用:
将输入转换为另一种形式——学习“信息”(information),提取并表示它。例如:图像分类、图像标注。
预测序列的缺失值或未来值——学习“因果”(causality),然后进行预测。
合成类似输出——学习“结构”(structure),然后进行生成。
概括和过拟合
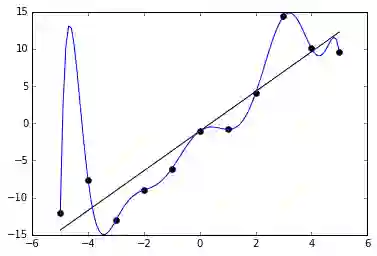
过拟合(overfitting)是指你找到了一个能够很好地拟合训练数据的模型,但这个模型不够概括。
例如:背下模拟测验答案的学习会在模拟测验上获得高分,但在期终测验中很可能会考砸。
一些折衷:
模型表示能力(representation capacity):较弱的模型无法建模函数,但较强的模型更容易发生过拟合。
训练迭代(iteration):训练过少没有给够拟合函数的时间,训练过多给了更多过拟合的时间。
你需要寻找弱模型和过拟合模型之间的中道。
交叉验证(cross validation)是标准技术:
留置一些从未训练过的数据用于之后的验证。
完成所有训练后,在留置数据上运行模型。
交叉验证之后你不能再调整模型了(当然你可以收集更多数据)。
如果模型训练分阶段进行,需要为每个阶段留置数据。
深度学习是机器学习技术的一个分支。它是一个强大的模型,在概括性方面也很成功。
前馈网络
前馈网络(feedforward network)用以下函数家族表示y = f*(x):
u = f(x; θ)
θ为模型参数。可能有几千个,也可能有几百万个θ1...θT。
f是一个函数家族。f(x; θ)是一个在x上的单元函数。u为模型输出。
你可以想象一下,如果你选择了一个足够一般的函数家族,有很大的几率,其中一个与f*相似。
例如:参数表示矩阵和向量:
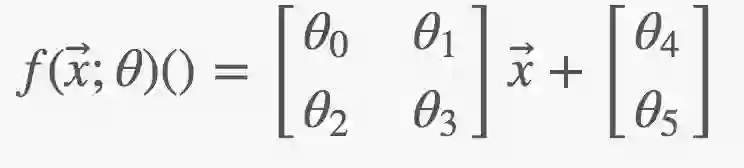
设计输出层
最常见的输出层是:
f(x; M,b) = g(Mx + b)
参数θ用M和b表示。
线性部分Mx + b确保输出依赖于所有输入。
非线性部分g(.)让你可以拟合y的分布。
例如,输入是照片,输出分布可能是:
线性:y ∈ ℝ,例如照片的萌度
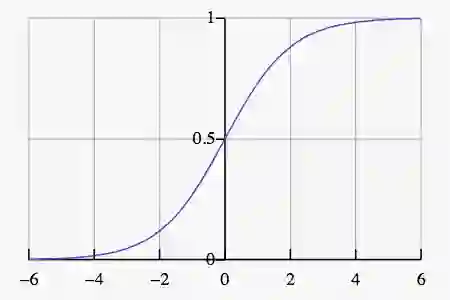
sigmoid: y ∈ [0, 1],例如照片是猫的概率
softmax: y ∈ ℝC及∑ y = 1,例如,照片是C类猫中的一种的概率
为了确保g(x)拟合分布,你可以使用:
线性:g(x) = x
sigmoid: g(x) = 1/(1+e−x)
softmax: g(x)c = exc/∑iexi
softmax实际上是欠约束的,而x0常常设为1. 在这一情形下,sigmoid不过是有两个变量的softmax。
这是为何以上这些g函数是很好的选择背后的理论,不过还有很多其他不同的选择。
寻找θ
通过解决以下面向J的优化问题的成本函数(cost function)寻找θ:
深度学习成功的原因是有一个很好的算法家族来计算min.
这些算法是梯度下降(gradient descent)的变体:
theta = initial_random_values()loop {xs = fetch_inputs()ys = fetch_outputs()us = model(theta)(xs)cost = J(ys, us)if cost < threshold: exit;theta = theta - gradient(cost)}从直观上说,在每个θ处,选择能最大程度上降低成本的方向。
这需要你计算梯度dcost/dθt.
你不希望梯度接近0,否则的话学得太慢了,也不希望梯度接近无穷,因为那是不稳定的。
这是一个贪婪算法,因此可能收敛到局部极小值(local minimum)。
选择成本函数
成本函数可能是任何函数:
误差的绝对值的总和:
J = ∑|y - u|
误差的平方的总和:
J = ∑(y - u)2
只要函数在分布一致时达到最小值,理论上就可以成为成本函数。
一个很好的想法是u表示y分布的参数。
理由:自然过程常常是模糊的,任何输入都可能具备某个范围内的输出。
这一方法同时给出了一个精确程度的平滑测量。
最大似然原则意味着:θML = arg maxθ p(y; u)
因此我们希望最小化:J = -p(y; u)
对i个样本而言:J = -∏ip(yi;u)
两边取对数:J' = -∑ilog p(yi; u)
这就是交叉熵(cross-entropy)。
对y ~ Gaussian(center = u)(中心(均值)为u的高斯分布空间)应用以上想法:
p(y; u) = e-(y-u)2
J = -∑log e-(y-u)2 = ∑(y−u)2
这就是平方总和是一个好选择背后的动机。
正则化
正则化(regularization)技术指试图减少概括性误差(generalization error)的方法。
它并不试图改善训练误差(training error)。
偏好较小的θ值:
给J加上某个θ的函数,我们可以鼓励较小的参数。
L2: J' = J + ∑|θ|2
L1:J' = J + ∑|θ|
L0不是平滑的。
注意,对θ -> Mx + b而言,通常仅仅增加M。
数据增强(data augmentation):
更多样本可以缓解过拟合。
同时考虑基于已有数据生成合理的新数据。
旋转、拉伸已有图像以创建新图像。
在x、网络层、参数中加入微小的噪声。
多任务学习(multi-task learning):
在若干不同的任务间共享同一网络层。
迫使该网络层选择和通用任务集合相关的有用特征。
及早停止(early stopping):
留置一个在训练中从未使用的验证集。
当验证集的成本停止下降时,停止训练。
你需要一个额外的测试集来真正地评估最终表现。
共享参数:
如果你了解你的数据的不变性,将其编码进你的参数选择。
例如,图像具有平移不变性,因此每个小块应该具有相同的参数。
dropout:
随机关闭网络层中的某些神经元。
神经元学习不理所应当地接受输入数据。
对抗(adversarial):
通过在训练数据点附近生成对抗性数据,使得靠近训练数据点的点时常出现
深度前馈网络
深度前馈网络(deep feedforward network):
u = f(x, θ) = fN(...f1(x; θ1)...;θN)
该模型具有N层。
f1...fN-1:隐藏层(hidden layer)。
fN:输出层。
深度模型听起来像是一个坏主意,因为它需要更多参数。
在实践中,它其实需要更少的参数,同时模型表现更佳。
一个可能的原因是每层学习数据的更高层的特征。
残差(residual)模型:
f'n(x) = fn(x) + xn-1
设计隐藏层
最常见的隐藏层为:
fn(x) = g(Mx + b)
隐藏层的结构和输出层相同。
然而,在输出层上工作良好的g(.)在隐藏层上的表现并不好。
最简单也是最成功的g是线性整流函数(rectified linear unit,ReLU):g(x) = max(0, x)
和sigmoid相比,当x非常大时,ReLU的梯度不会趋向0.
其他常用的非线性函数有Modulated ReLU:g(x) = max(0, x) + α min(0, x)
其中alpha为-1、非常小的值,或一个模型参数本身。
直觉是当x < 0时该函数仍有斜率。
在实践中,该函数和ReLU互有胜负。
maxout: g(x)i = maxj∈G(i)xj
G将区间[1..I]分成子集[1..m]、[m+1..2m]、[I-m..I].
比较一下,ReLU为ℝn -> ℝn,而maxout为ℝn -> ℝn/m。
它是每组m输入的最大值,可以将它看成m段线性分区。
线性:g(x) = x
乘以下一层后,它等价于:fn(x) = g'(NMx + b')
它是有用的,因为我们可以用它化简N和M,从而减少参数。
优化方法
我们使用的方法基于随机梯度下降(stochastic gradient descent):
选择训练数据的一个子集(一个minibatch),由此计算梯度。
优势:不取决于训练集的尺寸,而取决于minibatch的尺寸。
有很多进行梯度下降的方法(下面用g表示梯度,用ϵ表示学习率,用Δ表示梯度更新)
AdaGrad —— 基于梯度量级减缓学习速度:
RMSProp —— 基于指数衰减的梯度量级减缓学习速度:
Adam —— 很复杂
梯度下降——使用梯度:Δ=ϵg
动量(momentum):使用指数衰减梯度(exponential decayed gradient):Δ = ϵ ∑ e−tgt
自适应学习率(adaptive learning rate),下面ϵ = ϵt:
牛顿法(Newton's method):由于技术原因难以应用。
批量归一化(batch normalization)是进行如下变换的一个网络层:y = m(x-μ)/σ + b
m和b是可学习的,而μ和σ是均值和标准差。
这意味着层与层之间可以完全独立(前一层参数的调整不会影响当前层的分布)
课程学习(curriculum learning):提供比较容易的内容供首先学习,接着加入难一点的内容。
简化网络
到目前为止,我们具备了足够的基础,可以设计和优化深度网络了。
然而,这些是非常通用和大型的模型。
如果你的网络有N层,每层有S输入/输出,那么参数空间(parameter space)为|θ|=O(NS2)。
这带来两个缺点:过拟合,更长的训练时间。
有很多缩减参数空间的方法:
寻找问题的对称性,选择具有对称不变性的层。
创建较低输出维度的层,网络必须总结信息至更紧凑的表示。
卷积网络
卷积网络(convolutional network)通过使用卷积(下文用星号表示卷积操作)取代矩阵乘法以简化某些层:
fn(x) = g(θn * x)
它用于空间分布(spatially distributed)的数据,包括一维、二维、三维数据。
一维:(θ ∗ x)i = ∑aθaxi+a
二维:(θ * x)ij = ∑a∑bθabxab+ij
它的基本思想(和精确的数学定义略有不同)是:每个数据点的输出是周围数据点的加权和。
好处:
θ为零时(i = 0附近的窗口w除外),刻画了位置概念。
刻画了平移不变性的概念,因为每个点的θ不变。
将模型的参数数目从O(S2)降低到O(w2)。
若有n层卷积,则基本值将可以影响wn半径内的输出。
实践中考虑:
用0补齐边缘。
平铺卷积(tiled convolution)(循环使用不同的卷积)
池化
经常与卷积网络配合使用的网络层是最大池化(max pooling):
它的结构与maxout相同,一维情形下两者等价。
在高维情形下,G将输入空间分区为tile。
最大池化减少了输入数据的尺寸,可以看成是将输入的局部区域塌缩成总结。
最大池化同时提供了较小平移的不变性。
循环网络
循环网络(recurrent network)使用之前的输出作为输入,形成循环:
s(t) = f(s(t-1), x(t); θ)
状态s包含过去的总结,而x是每步的输入。
循环网络比全动态(fully dynamic)模型简单:
s(t) = d(t)(x(t), ... x(1); θ')
所有时间的θ都是一样的——循环网络假定时间不变性。
RNN可以学习任何输入长度,而全动态模型在不同的输入长度下需要不同的g.
输出:模型可能在每个时步(time step)返回y(t):
每步无输出,只关心最终状态。例:情感分析(sentiment analysis)
y(t) = s(t),模型没有内部状态,因而不那么强大。但这样的模型更容易训练,因为训练数据y就是s.
y(t) = o(s(t)),使用一个输出层来转换(以及隐藏)内部状态。但训练起来更间接也更难。
一如既往,我们偏好将y看成一个分布的参数。
选择的输出可以被传回f作为额外输入,否则,y之间互相独立。
生成句子的时候,我们需要单词之间的条件依赖性,例如:A-A和B-B可能是合理的,A-B则可能不合理。
完成:
在x(t) -> y(t)的情形下,输入终结时结束。
额外输出y(t)end作为输出完成的概率。
额外输出y(t)length,剩余/总输出长度。
基于同样的梯度下降类方法优化。
通过将循环展开成一个扁平的公式计算梯度,这称为沿时间反向传播(backpropagation through time,BPTT)。
BPTT的一个难点是梯度Δ = ∂/(∂st):
Δ > 0:状态爆炸,提供了不稳定的梯度。解决方案是在下降过程中裁剪梯度更新至一个合理的尺寸。
Δ ≈ 0:这让状态可以在较长时间内保持,然而梯度下降方法需要梯度才能工作。
Δ < 0:RNN处于持续损失信息的状态。
有一些RNN的变体施加了简单的先验以帮助维持状态s(t) ≈ s(t-1):
s(t) = fts(t-1)+f(...):我们可直接得到一阶导数∂/∂x
它让我们传递之前步骤的梯度,即使f本身梯度为零。
长短时记忆(long short-term memory,LSTM)建模输入、输出和遗忘:
s(t) = fts(t-1) + itf(s(t-1),x(t);θ)
输出:y(t) = ots(t)
LSTM使用概率(称为阀门(gate)):ot 输出,ft 遗忘,it 输入。
阀门通常是sigmoid层:
ot = g(Mx + b) = 1/(1+eMx+b)
生成新数据(g)和使用它作为长期信息(i)是解耦的,因而我们得以保留长期信息。
因为过去和未来之间有直接的连接,所以更多地保留了梯度。
门控循环单元(gated recurrent unit, GRU)是一个较简单的模型:
s(t) = (1-ut)s(t-1) + utf(rts(t-1), x(t); θ)
阀门:ut 更新,rt 重置。
LSTM和GRU互有胜负。
循环网络的dropout偏好d(f(s,x; θ))(不储存信息),而不是d(s)(损失信息)。
记忆网络(memory network)和关注机制(attention mechanism)。
数据集的用途
输入数据的类别非常广,深度学习可以应用的地方很多。
图像向量[0-1]WH:图像到标签,图像到描述。
基于每个时间切片的音频向量:语音到文本。
文本嵌入词汇向量[0-1]N:翻译。
知识图:问题回答。
自动编码器
自动编码器(autoencoder)包含两个函数,从输入空间到表示空间(representation space)的编码函数f和解码函数g. 目标函数为:
J = L(x, g(f(x)))
L是损失函数(loss function),当图像相似时,L的值较低。
想法是表示空间学习重要的特征。
有一些额外的正则化工具以防止过拟合:
稀疏自动编码器(sparse autoencoder)最小化J' = J + S(f(x))。这是表示空间上的正则化。
降噪自动编码器(denoising autoencoder)最小化J = L(x, g(f(n(x)))),其中n加入噪声,迫使网络区分噪声和信号。
收缩自动编码器(contractive autoencoder)最小化J' = J + ∑ ∂f/∂x,迫使编码器变得平滑:相似的输入得到相似的输出。
预测自动编码器(predictive autoencoder)最小化J = L(x, g(h)) + L'(h, f(x))。预测自动编码器不同时优化g和h,而是交替优化两者。
另一个解决方案是训练一个判别网络D,D输出一个标量,该标量表示输入是生成数据的概率。
表示学习
想法是不再优化u = f(x; θ),转而优化:
u = ro(f(ri(x); θ))
ri和ro为输入表示和输出表示,但这一想法同样可以应用于CNN、RNN及其他模型。
例如,自动编码器的编码器那一半可以用作ri。
希望存在其他使任务更容易的表示。
表示可以在大规模数据上训练,从而更好地理解基本数据。
例如:单词是非常稀疏的输入向量(几乎全是零,极少的激活)
单词的语义表示更容易操作。
实践建议
为模型表现寻找一个合适的测度。
尽快构建可以工作的模型。
测量和迭代数据。
附录:概率
概率(probability)是一个有用的工具,因为它让我们可以建模:
随机性:真随机系统(量子系统等)
隐变量(hidden variable):可能是决定性的,但我们无法知道所有关键因素。
不完整模型(incomplete model):特别是对微小扰动敏感的混沌系统
概率论的知识在阅读论文和深入了解机器学习方面很有用,但对使用神经网络而言不是必不可少的。
概率:P(x, y)意为P(x=x, y=y)
边缘概率(marginal probability):P(x) = ∑yP(x=x, y=y)
链式法则(chain rule):P(x, y) = P(x|y)P(y)
如果x和y相互独立(independent):P(x, y) = P(x)P(y)
期望(expectation):𝔼x~P[f(x)] = ∑xP(x)f(x)
贝叶斯规则(Bayes rule):
自信息(self information):I(x) = - log P(x)
香农熵(Shannon entropy):H(x) = 𝔼x~P[I(x)] = - ∑x P(x) log P(x)
KL散度(KL divergence):
KL散度可以用来衡量两个分布P和Q的相似程度(KL散度不是真相似性度量,因为它是不对称的)
交叉熵(cross entropy):H(P, Q) = H(P) + DKL = -𝔼x~Plog Q(x)
最大似然(maximum likelihood):
令p为数据,q为模型:
θML = arg maxθQ(X; θ)
假定独立同分布,加上对数: θML = arg maxθ ∑x log Q(X; θ)
由于每个数据点似然相同:θML = arg minθ H(P,Q; θ)
KL散度中唯一变动的成分是熵:θML = arg minθ DKL(P||Q; θ)
最大后验(maximum a posteriori):
θMAP = arg maxθ Q(θ|X) = arg minθ -log Q(X|θ) - log Q(θ)
这类似基于先验Q(θ)的正则化项。


原文地址:https://randomekek.github.io/deep/deeplearning.html