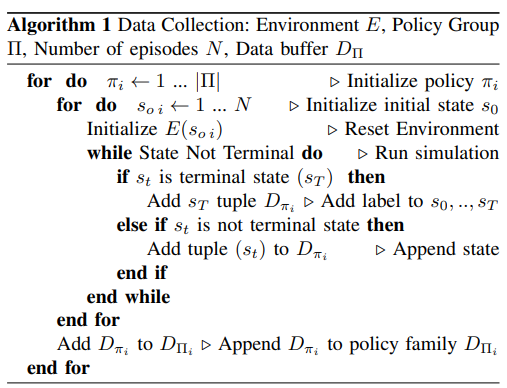
随着空对空导弹有效射程的增加,人类操作员越来越难以保持保证无人机安全所需的态势感知能力。这项工作提出了一种决策支持工具,帮助无人机操作员在超视距(BVR)空战场景中评估不同选项的风险,并据此做出决策。早期的工作侧重于单枚导弹造成的威胁,而在这项工作中,将思路扩展到了多枚导弹的威胁。所提出的方法使用深度神经网络(DNN)从高保真模拟中学习,为操作员提供一组不同策略的结果估计。研究结果表明,所提出的系统可以管理多枚来袭导弹,评估一系列选项,并推荐风险最小的行动方案。
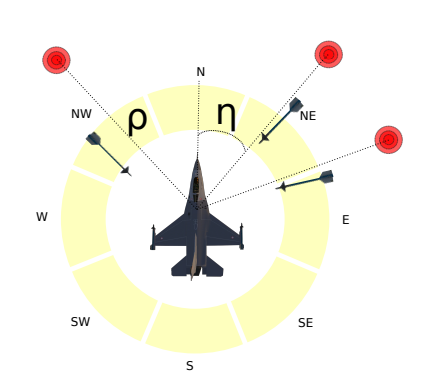
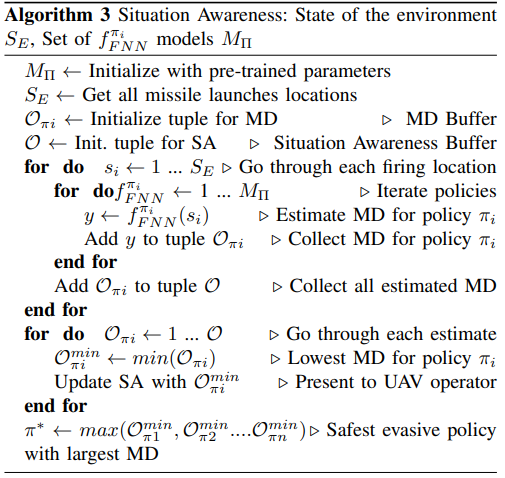
图 1:无人机面临三枚来袭导弹的情况符号表示。导弹当前的确切位置未知,但可以估计发射的时间和位置。在图 3-6 中,飞机图标周围的彩色区域用于显示朝该方向进行规避机动的预测未击中距离 (MD)。据此,操作员在决定选择何种航线时,可以在任务目标和风险之间做出权衡。
自第一次世界大战以来,空战发生了翻天覆地的变化。传感器、武器和通信技术的进步使飞行员能够在越来越远的距离上与敌机交战。这些进步推动了从 “视距内 ”空战向 “视距外 ”空战的过渡。在 BVR 中,来袭导弹的飞行时间可能长达数分钟,这使得无人机操作员很难评估所有来袭数据并选择最佳行动方案。事实上,操作员往往会失去对某些来袭威胁的跟踪。因此,需要一种能够同时处理多个威胁并提供整体分析的支持工具。这种工具应支持操作员平衡风险与任务目标之间的关系,因为风险最低的选择往往是完全忽略任务,而另一方面,忽略风险最终可能导致巨大损失。
由于雷达制导导弹的飞行时间可能很长,因此 BVR 空中格斗包含了一种可与星际争霸等即时战略游戏相媲美的元素。重大挑战包括高度非线性动态、信息不确定性以及对手的未知战略和目标。机载传感器可以根据敌机类型、电子战反制设备和天气情况输出对手位置的估计值。然而,虽然在面对敌方时并不总能获得精确信息,但操作员通常知道敌方飞机和武器系统的能力,而本文提出的方法将利用这些信息。
在之前的工作中,研究了无人机面对一枚来袭导弹的情况。利用强化学习(RL),我们计算出了最佳规避机动和执行机动时的失误距离(MD)。然而,这种方法无法用于同时面对多架敌机的情况。当考虑从不同角度射来的多枚导弹时,相对于一枚导弹的最佳规避机动与另一枚导弹不同,显然不能同时执行两种不同的机动。此外,针对一对来袭导弹威胁的最有效规避行动,可以通过离线求解特定问题并存储结果来确定,但由于可能的威胁组合数量庞大,这种方法变得不切实际。
本文首先要指出的是,对于人类操作员来说,MD 估值是一种直观的风险估计。因此,我们希望为操作员提供一系列选项,如图 1 所示。图中的黄色区域将根据风险程度进行着色。如果向南执行规避机动,MD 值为 2 千米,则会被染成绿色,而向西执行机动,MD 值为 0.05 千米,因此会被染成红色。
在面临上述多种威胁的情况下,要估算特定方向上特定机动的 MD,我们的步骤如下。首先,我们学习一组预定义的规避机动在不同罗盘方向上的单个威胁的 MD。然后,由于我们需要担心的是最小的 MD,因此我们只需遍历所有威胁,并保存每次机动的最小失误距离。
通过这种方法,可以提供一种决策支持工具,为一系列选项提供风险估计,而不会丢失任何已检测到的威胁。我们的方法还能让操作员意识到何时没有安全的撤离选择,例如在近距离受到来自相反方向的威胁时。为更绝望的措施提供决策支持,如发射所有剩余武器然后失去无人机,或依赖模型无法捕捉的方法,如电子战或箔条/照明弹系统。
因此,这项工作的主要贡献是提供了一种方法,使无人机操作员能够评估和处理任意数量的来袭威胁,从而扩展了先前考虑单一敌对导弹的工作。工作概述如下: 第二节回顾了相关工作。第三节介绍 ML 和导弹制导的背景,第四节正式定义问题。第五节介绍了建议的解决方案,第六节展示了仿真结果。最后,第八节将进行讨论并得出结论。