随着自主移动机器人在仓储自动化、航空测绘等领域的广泛应用,对可靠且具备弹性的运动规划与控制需求日益凸显。满足复杂且常具时效性的任务目标需要先进运动规划技术。时序逻辑(如信号时序逻辑STL)为此提供了严谨紧凑的任务规范编码框架,涵盖逻辑、空间与时间约束。然而,设计完全满足这些规范的控制算法——尤其在需多智能体协作、应对突发事件及实时决策的场景中——仍面临重大挑战。本论文通过三大核心目标应对这些挑战:首先,研究多智能体系统实现集体时序逻辑规范的可扩展框架,包含智能体可异步完成的"可抢占任务"。结合基于采样的轨迹生成(如RRT*)与混合整数规划(MIP),解决异构智能体协同任务问题。其次,探索弹性运动规划策略,引入量化指标以最小化约束违反时的规范偏离度。该指标通过捕捉累积任务松弛量,支持动态调整STL规范结构(如修改任务时间窗或必要时移除任务)。最后,针对需快速决策的任务(如对非合作目标执行任务),基于机器人执行机构限制与优化后的STL任务序列构建控制屏障函数(CBF),实现实时STL规划。所提框架与算法通过理论分析、仿真及实验验证,在复杂机器人应用中展现出卓越的可扩展性与有效性。这些成果推动时序逻辑控制研究发展,增强STL在弹性与实时运动规划中的适用性,为在动态环境中执行复杂任务的自主移动机器人提供了核心方法与工具支撑。
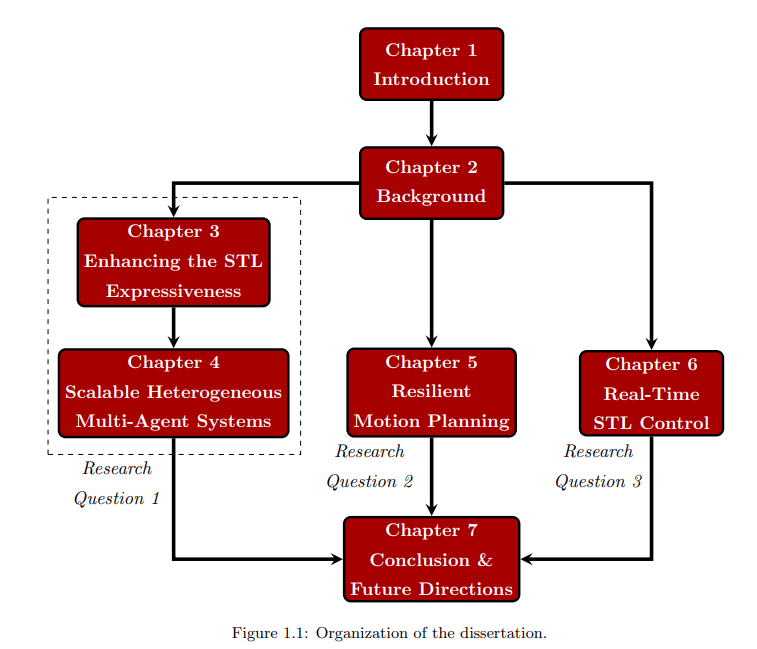
第二章:介绍信号时序逻辑(STL)的基础理论及其量化度量特性,同时讨论图论和时变控制屏障函数(TV-CBFs)的预备知识,这些内容在第四、五、六章具有关键应用。
第三章:本章通过引入可定义信号积分与导数相关特性的新型谓词,扩展STL的表达能力。新谓词通过不同时间步的信号值定义期望区间内的累积性与相对性规范,在保留STL原生功能的同时,实现对信号/轨迹局部与全局特性的广泛控制。传统STL及其他时序逻辑均无法描述信号值累积成功的查询需求,因其缺乏含显式时间边界且关联累积进度的算子或谓词。我们在传统STL基础上提出增强语法结构,支持通过时序逻辑规范要求可抢占任务及累积属性达成特定进度。通过二维连续空间中自主机器人的案例研究,证明新谓词能更丰富、更具表现力地构建任务规范。本章还给出标准STL语义及新谓词的混合整数编码方案,该方案在第四、五章以混合整数线性规划(MILP)形式部分应用于STL控制综合,以生成满足STL规范的轨迹。
第四章:研究时空规范下异构多智能体系统的轨迹协调问题。利用第三章定义的新谓词,表达特定时间窗内目标位置需出现的智能体数量与类型;同时采用积分谓词规定可由多智能体异步实现的累积进度目标。为生成最优轨迹,构建以最小化智能体移动量为目标的混合整数线性规划(MILP),并引入能量约束及分层求解策略处理能量感知协调问题。在随机能耗模型引导下,智能体在确保充电可用性的前提下运行。此类随机能量动态特性会导致偏离标称计划并延迟任务完成。为此定义初步度量指标评估预期延迟(时间松弛度),该指标将在第五章深入分析。本章所提方法结合基于采样的轨迹生成(如RRT∗)与MILP优化规划,通过积分谓词定义团队级共同目标,并借助STL规范部署具有特定能力与独有动态特性的异构智能体。通过两个案例研究(智能体在动态特性和能力如传感器/载荷方面均存在异构性),证明相比传统STL,该框架能更丰富、更具表现力地规划多智能体轨迹。
第五章:提出可量化STL规范时间松弛度并支持约束不可行时弹性控制综合的度量指标。该指标量化任务间累积松弛程度,其最小化过程通过两种方式改变原始STL规范结构:i) 调整时间区间;ii) 必要时完全移除任务。同时提出反应式规划算法,生成可抵御时间约束违反的弹性机器人轨迹。系统通过实时监测机器人行为,在遭遇突发事件(如潜在碰撞、需移除任务或部分满足的环境变化)时即时决策:利用控制屏障函数启动局部修正或重规划轨迹以最小化时间违规。该策略旨在防止任务完成出现任意长延迟,并以最小时间松弛度促成任务达成。为在保障空间鲁棒性前提下实现此目标,引入高效分层式双轨MILP优化方案,同步最小化时间松弛度与最大化空间鲁棒性。通过减少优化参数(聚焦局部与未来变量)及精简混合整数约束数量提升计算效率。区别于现有文献仅关注离线解和/或零违规保证,本方法提供在线反应式规划,持续监测并调整机器人轨迹以按用户偏好最小化违规。理论分析佐证框架有效性,移动机器人仿真验证其性能优势,并与现有度量方法进行对比。
第六章:提出的实时轨迹规划问题,要求满足含动态目标(即时变规范)的STL规范。核心挑战在于:当机器人未知目标运动模式时,如何确保满足针对动态非合作目标的STL规范。提出考虑机器人执行机构限制与可行STL任务序列的控制屏障函数(CBFs)。展示包含周期性任务分解及替代/冗余场景的可行序列生成流程,并基于该序列构建顺序CBFs以应对目标运动的最坏边界,实现与目标相关的逻辑、时空需求。理论证明:若目标集紧凸下近似存在可行序列,则可保证定义在紧目标集上的STL规范满足。在此假设下,目标运动模式(随机、预设或对抗性)不影响任务成功率。任务场景变化及目标数量激增亦不损害实时适用性。理论结果重点阐明:i) STL截止期限与任务序列可行性的关联;ii) 周期性任务分解对序列特性的影响;iii)(子)序列可行性与CBF约束的关系;iv) 所提框架对STL规范的整体满足能力。通过仿真与无人机实验验证方法优势并分析性能。
第七章:末章总结全文研究成果,讨论阶段性成果并提出未来研究方向。