
卫星/惯性超紧组合导航系统以其定位精度高、动态性能优良、抗干扰能力强等特性成为组合导航领域的研究热点。介绍了卫星/惯性超紧组合的定位原理,基于对技术原理的分析,比较超紧组合模式相对于其他组合模式的优势特点;以高动态下超紧组合技术及卫星/微惯性单元超紧组合为代表介绍国内外研究现状;总结了亟待研究的容错控制技术、神经网络辅助、多传感器辅助超紧组合等关键技术,并对卫星/惯性超紧组合向着低成本、高精度、强稳定趋势发展的前景进行展望。
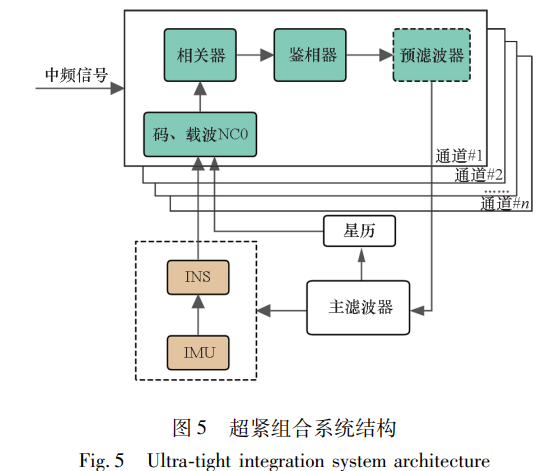
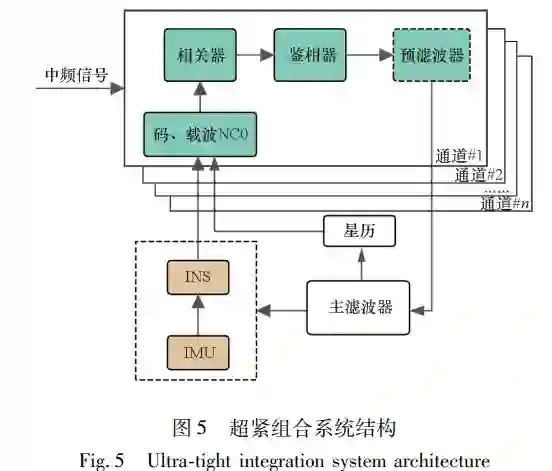
全球导航卫星系统(Global Navigation Satellite System,GNSS)经过数十年的研究和发展,已能实现全天候的室外高精度定位。然而,GNSS定位原理决定了接收机需要至少4颗卫星的信号才能解算出位置信息,且卫星信号较弱,易受电磁干扰与遮挡。与此相反,惯性导航系统(Inertial Navigation System,INS)具有不受环境约束的特性,能够实现完全自主定位,但其缺陷在于漂移误差会随着工作时间的推移而不断累积。因此,在卫星信号较弱且遮挡较多的环境下,将GNSS与INS进行组合,实现各自的优势互补,已成为导航定位领域的一个热点。 组合、紧组合和超紧组合这三种1。其中,松组合和紧组合本质上都是使用GNSS辅助INS进行导航,在卫星信号失锁时,INS仍然会出现误差累积。超紧组合在紧组合基础上使得组合滤波器也向接收机反馈校正信息2,能够实现更深层次的组合,大幅提升了鲁棒性。因此,本文对于超紧组合系统的结构特点和发展现状进行分析,并对超紧组合涉及的关键技术及发展前景进行总结和展望。
成为VIP会员查看完整内容
相关内容

Arxiv
153+阅读 · 2023年3月29日
相关主题
相关VIP内容
相关资讯
相关论文
Arxiv
153+阅读 · 2023年3月29日