
当今的潜艇一般被描述为最复杂的系统工程设计问题之一,这项研究涵盖了这一巨大设计问题空间中性能的一个方面。操纵和控制性能传统上至少被视为两个不同的问题,即深潜潜艇的性能和潜艇在海面等边界附近运行的性能。多年来,对深水潜艇操纵和控制性能的研究一直是一门活跃的学科;此类研究的主要目的是高水平地了解潜艇的操纵特性,以帮助确保设计的安全性和操作的有效性。
然而,当潜艇在使用潜望镜时所需的典型深度、在电池充电期间喷鼻息或在某些情况下在低速至零速盘旋时运行时,潜艇会因高阶海洋载荷而经历复杂的振荡运动。二阶垂直平面载荷可以有效地表现为时间变化的吸力,这可能会导致潜艇被吸到海面上,冒着被拉断的危险,增加被探测到的可能性,或者潜艇可能需要吸收海水压舱物来抵消吸力效应,这可能意味着如果潜艇需要迅速脱离海面,就会有很大的失稳。使用传统的准稳态方法对这些非稳态效应进行建模的保真度不够,而这种方法在对深潜潜艇进行建模时非常成功。
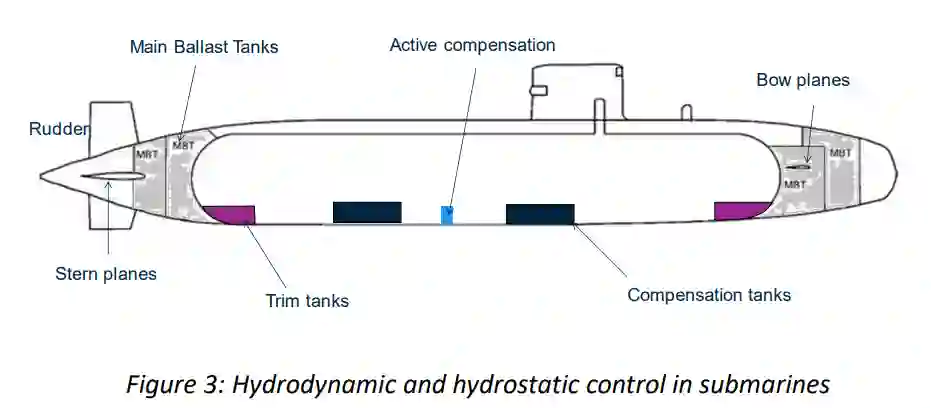
因此,为了在设计初期就了解潜艇在水面波浪影响下的行为,以及从艇体的水动力形状、内部布置、压载舱和压载泵的性能要求以及控制面的要求等角度了解对全艇设计的影响,需要一个合适的设计工具和分析过程。
本论文包括不同工程学科的成果;主要是海军建筑学(特别是潜艇流体力学和海洋工程的专业领域)和控制工程。论文特别借鉴了海洋工程领域的研究成果,尤其是量化二阶效应的方法,为波浪下潜艇控制问题的控制系统设计提供了启示。为此,论文提供了一种可能的方法,用于根据现有的评估方法制定控制系统规范。
成为VIP会员查看完整内容
相关内容

Arxiv
225+阅读 · 2023年4月7日

相关VIP内容
相关资讯
相关论文
Arxiv
225+阅读 · 2023年4月7日