随着无人驾驶飞行器(UAV)越来越普及,价格也越来越低廉,确保其安全运行至关重要,尤其是在飞机的全球定位系统(GPS)等关键设备周围。GPS 在航空系统中发挥着不可或缺的作用。本研究提出了一种高效的多类检测方法来识别无人机上的 GPS 攻击,重点是区分欺骗和干扰攻击。所提出的方法优于现有方法。本研究获得的结果有助于提高无人机的安全性,并为开发强大的检测系统以应对无人机领域不断演变的威胁提供了宝贵的信息。
近年来,在多项创新技术的推动下,无人驾驶飞行器(UAV)市场呈指数级增长(Li 等人,2019 年)。这些技术进步在提高盈利能力、减少业务流程瓶颈和推动无人机市场增长方面发挥了重要作用。随着无人飞行器在各种应用中的使用持续增加,并认识到单一故障可能造成的严重后果,保护这些飞行器免受可能危及其完整性和运行的外部威胁至关重要。无人机通常通过无线网络(如 Wi-Fi 或蜂窝网络)运行,与任何连接设备一样,无人机的软件或固件也存在漏洞(Dey 等人,2018 年)。黑客可以利用这些漏洞破坏无人机或其所连接网络的安全。可能会面临多种威胁,如信号干扰、物理障碍、网络攻击企图、网络拥塞或附近设备的干扰。此外,与网络连接的无人机可能成为黑客的攻击目标,他们会寻求未经授权的访问来控制无人机或获取通过网络传输的机密信息(Yaacoub 等人,2020 年)。
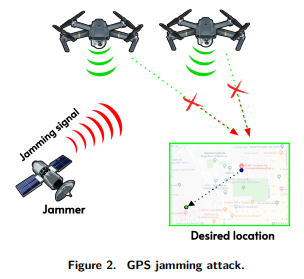
无人机最重要的部件之一是其全球定位系统(GPS)(Perez-Grau 等人,2018 年)。尽管全球定位系统被广泛使用,但该系统并不安全(Ferrao、da Silva 等人,2020 年;Ferr ˜ ao、Pigatto ˜ 等人,2020 年)。民用信号没有加密,这意味着任何人都可以伪装和篡改 GPS 信号以达到自己的目的。无人机非常容易受到 GPS 欺骗攻击,即攻击者发送比合法信号更强的信号,使无人机的 GPS 信号接收器锁定恶意伪造的 GPS 信号。鉴于这些定位系统的性质,利用无人机上的 GPS 漏洞相对容易(Ferrao, da Silva, et al., 2020; ˜ Ferrao, n.d.)。拥有适当技术知识的攻击者可以破坏 GPS 信号,使无人机接收到错误的定位信息。
在这种情况下,提出了一种针对无人机 GPS 攻击的多类检测方法。该方法在检测 GPS 欺骗和干扰攻击方面效率很高,尤其是与文献中的其他干扰和欺骗检测机制相比,显示出良好的效果。结果表明,该解决方案在使用大型数据集时效果最佳,该数据集是在对应于无人机通常飞行策略和问题飞行的一小部分数据上训练出来的。
本研究提出了一种先进的多类检测方法,以解决围绕无人机 GPS 攻击日益增长的问题。现有的方法通常侧重于单类检测或孤立地使用传统的机器学习模型,而本研究提出了一种综合方法,将几种成熟的机器学习算法结合起来,以准确区分两种类型的 GPS 攻击,如欺骗和干扰。通过利用不同模型的协同作用,所提出的方法提高了准确度和精确度,在相同问题领域优于以往的技术。此外,还可以将这项工作归纳为对科学界的三大贡献:
-
开发一种高效的多类别方法来检测无人机上的 GPS 攻击,检测方法可以区分和识别欺骗和干扰攻击;
-
共享数据集和信息处理,供科学界复制和比较;
-
与现有机制相比,结果表明所提出的机制优于文献中发现的其他干扰和欺骗检测机制。
本文接下来的内容安排如下。第 3 节介绍了相关工作。第 2 节介绍本研究的背景,第 4 节介绍开发的主要阶段。第 5 节介绍所取得的主要成果。第 6 节是测试结论的可视化,第 7 节是本研究的总体结论。