
描述
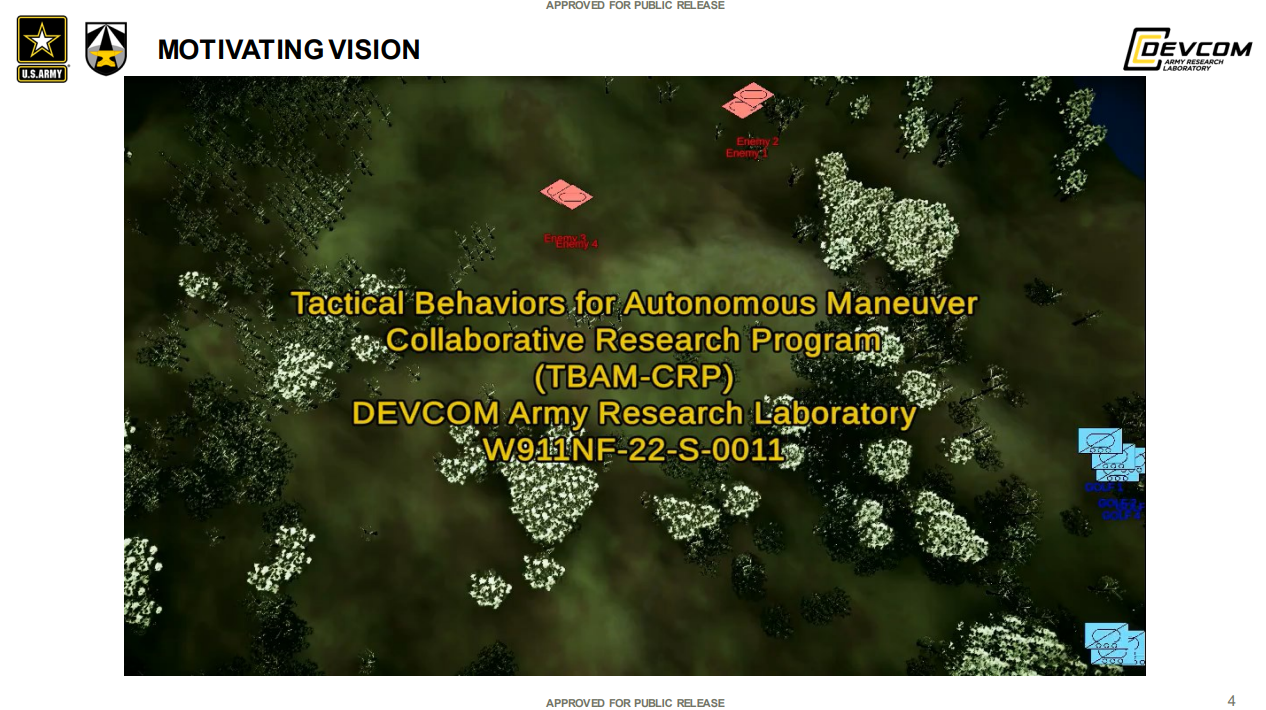
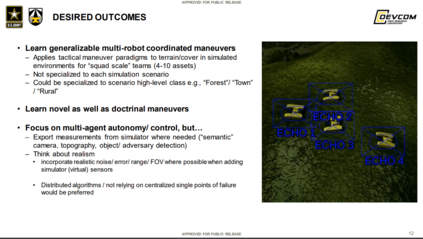
自主机动的战术行为(TBAM)合作研究联盟(CRA)的目标是为小型自主智能体团体开发协调行为,以便在复杂军事相关环境的现实模拟中执行理论和新的战术机动。
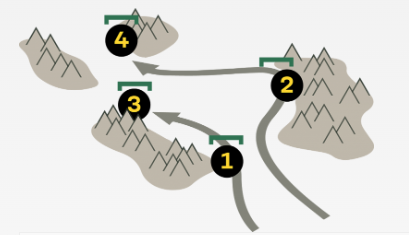
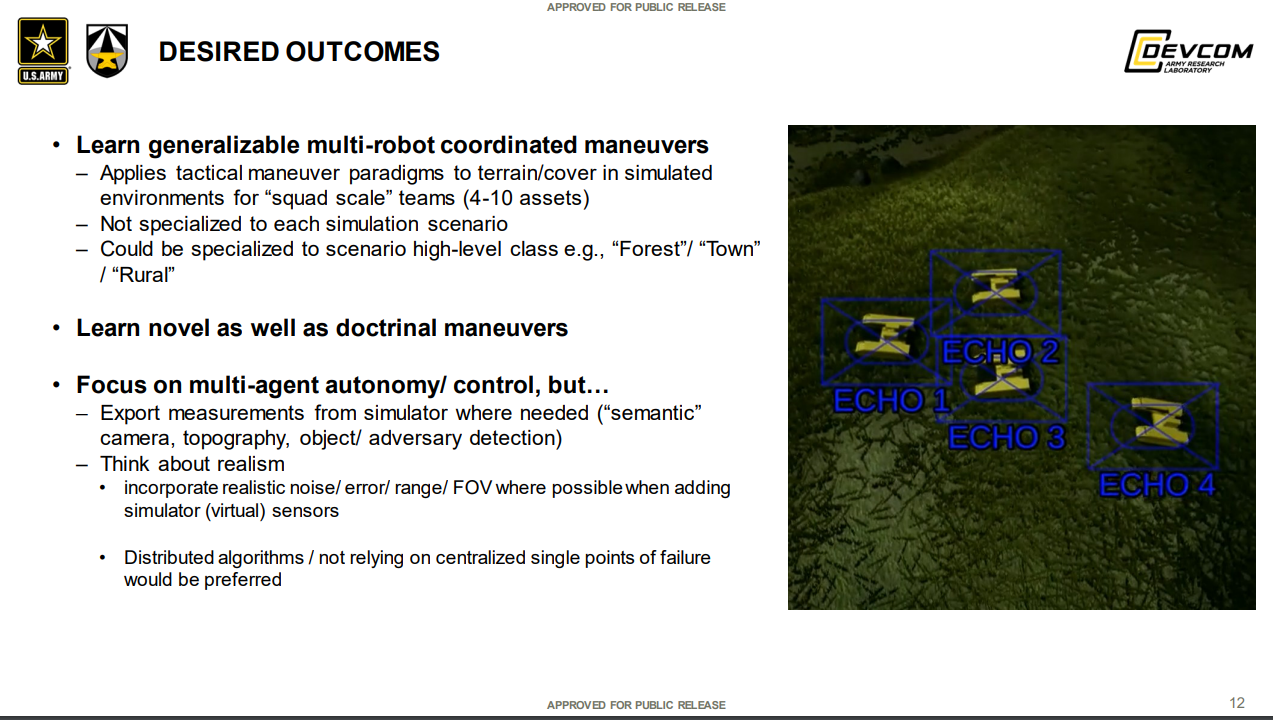
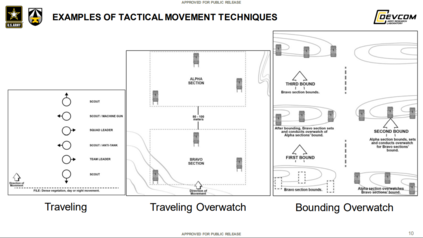
执行者开发了新的技术来学习以及展示在复杂地形的现实模拟中的协调机动模型,如森林/丛林、起伏的沙漠/草原、流域/湿地和农村环境(有边界围栏的田地、稀疏的道路网络、间歇性的流域和森林地区)。地面机器人小组表现出的协调行为应该找到与军事有关的路线,最大限度地提高掩护和隐蔽性,并像对手即将接触一样进行机动。在没有环境掩护,但任务需要穿越的地区,团队成员应该为其前进的队友提供掩护。
计划结构
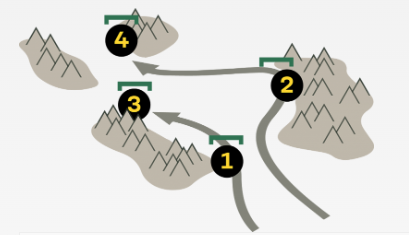
TBAM CRA是一个6.1基础研究计划。它由一系列两年期的冲刺工作和年度计划审查组成。每个两年的冲刺主题都集中在解决一组不同的科学领域,这将支持与内部DEVCOM ARL主题专家进行更高的技术准备水平(TRL)研究。第一个两年冲刺课题是 "复杂地形下的协调和对抗性战术演习",其作战方案名为 "运动到接触"。在这种情况下,与对手阵地的接触是一个持续关注的问题--在某些情况下,应该通过利用地形特征和掩体来避免这种接触;在其他任务中,应该通过协调机动--分布式系统的同步行动--以战术上的超越姿态迎接对手阵地。

成为VIP会员查看完整内容


相关内容

Arxiv
0+阅读 · 2022年12月19日
Arxiv
0+阅读 · 2022年12月15日
Arxiv
15+阅读 · 2022年1月5日
相关主题

相关VIP内容
相关资讯