模拟环境中的逼真行为是必要的,尤其是在训练模拟器的空对空战争中。与有限状态机(FSM)等以前的技术相比,有了行为树这一新框架,行为可以变得更加逼真、模块化、灵活和可扩展。人工运算符或智能体通常是静态构建的,这意味着一旦它们以特定方式构建,就不会改变其行为,因此在对它们进行一些练习后,就很容易预测它们的行为。即使是静态构建的智能体,其行为也会变得非常复杂,它们必须能够以合作的方式应对环境和其他智能体。利用新的算法和框架,这些智能体及其行为可以不断学习新的战术进展,并在不同的可能交战技术之间进行切换,以挑战人类操作员。智能体可以变得更智能、更逼真,帮助人类飞行员训练新的战术方法。该技术将在未来帮助设计人员看到新的模式,并创建可在多种场景中重复使用的通用行为。
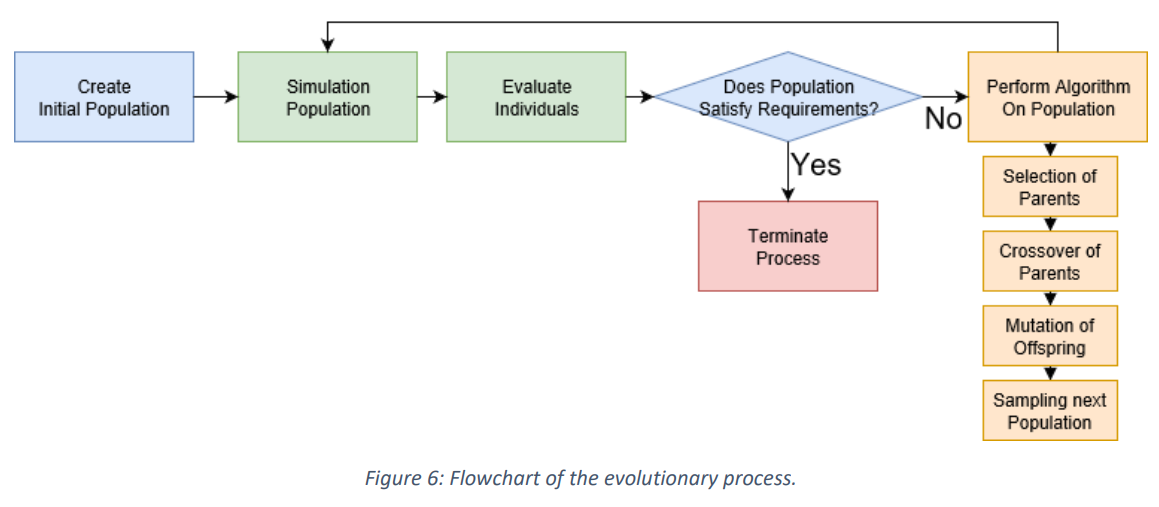
在本论文中,一种名为遗传算法(GA)和遗传编程(GP)的人工智能技术将作为一种优化算法,用于搜索解决方案空间,并在名为战术模拟(TACSI)的模拟环境中演化人工行为。模拟场景是两个智能体之间的超视距(BVR)搏斗,其中对手使用静态行为,而学习型智能体将针对静态行为进行训练。BVR 场景的设置是两个智能体以相同的起始位置、高度和武器装备(即四枚 BVR 导弹)面对面开始。学习智能体必须学习动作空间(即可用动作)和动作的工作原理,然后将其应用到状态空间(如识别目标和发射导弹)。然后,当一个或一组解决方案满足要求时,生成的解决方案将在新的场景设置中进行评估和测试,在新的场景设置中,位置、方向和高度都是随机的。在新的设置中测试智能体,可以分析其适应性。
从结果中可以看出,所有解决方案都有一个缺陷,即过于被动。算法很难设计攻击序列,但逃离和机动序列却不难设计。每种行为的模拟测试也表明了这一点,大多数情况下都以平局告终。
第 2 节将介绍 BT 框架的历史、包含的不同节点类型以及 BT 框架的优缺点。第 3 节将向读者深入介绍人工智能,并介绍机器学习(Machine Learning),这是一种通过奖励和将输入映射到输出来智能训练智能体的技术。第 4 节将介绍进化计算(EC)和选择开发的算法。所选技术称为遗传算法和遗传编程。第 5 节将介绍系统架构、组件以及与 TACSI 的集成。第 6 节将展示四种不同解决方案在斗狗场景中的模拟评估。第 7 节将讨论算法、框架和评估。第 8 节将介绍本论文在伦理和道德标准方面的合理性,第 9 节将介绍未来的工作。