机器人实验的数据收集和分析技术杂乱无章且不完整。为无人系统的数据和元数据建立最佳实践工作流程,可以利用现场实验(FX)和模拟来支持存档数据的重复使用和可重复分析。需要可重复使用的端到端数据工作流程。在多种开放标准、开源工具和权威数据格式的基础上,美海军正在开展的工作重点是将数据格式描述语言(DFDL)技术应用于任务指令、遥测记录和传感器流的存档记录/回放。这种必要的能力可实现更大的范围,即无人系统现场实验(FX)、建模与仿真(M&S)支持实时-虚拟-建构(LVC)合成、数据存储库和可重复分析的数据战略。利用开放功能构建的完整端到端工具链有可能满足这些重要需求。本备忘录介绍了可共同建立此类信息基础设施的组件技术。不实施共享数据战略会阻碍人机团队之间必要的互操作性。
收集、分析和重放无人系统测试和仿真过程中收集的数据对工程的连贯进展至关重要,但几乎普遍被忽视。为 NPS 无人系统现场实验(FX)正式定义和实施的数据战略可为海军轨道相关数据收集的大数据处理奠定基础。在过去十年中,大数据能力取得了显著进展,显示了对许多不同数据源进行压缩(解析、处理、分析、组合、比较)的能力,因此出现了一个合理的概念性问题:为什么机器人数据也不能处理?虽然现在可以找到许多组件,但情况并不完整。缺失的功能包括
- 无人系统操作员数据收集工作流程的规范化。
- 解析和正式定义所收集信息的能力,使其可重复阅读和重复使用。
- 重放数据流和检查参数结果以进行单元测试评估的能力。
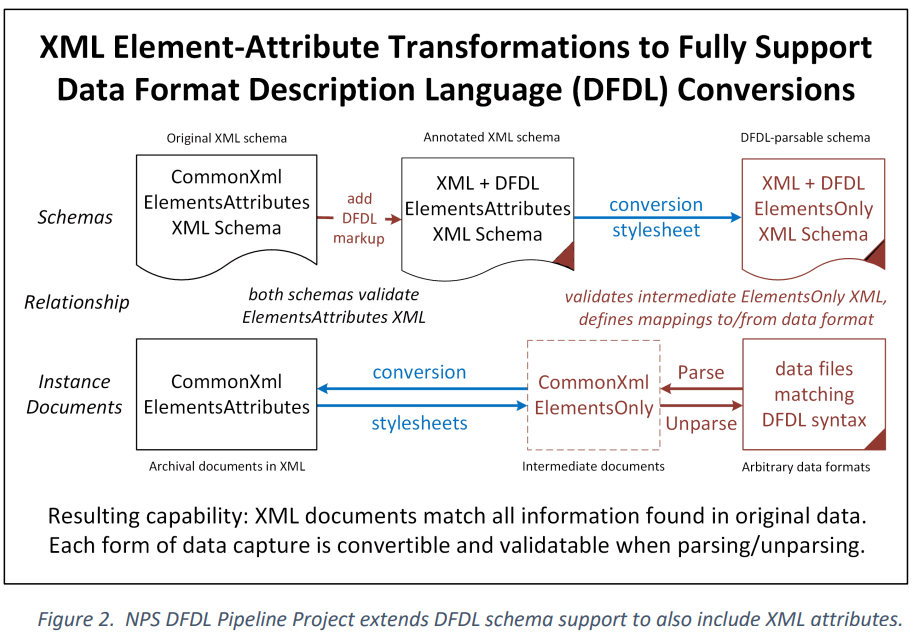
本报告总结了如何利用数据格式描述语言(DFDL)结合权威的数据记录模式来支持这些缺失的功能。报告还进一步记录了这些功能如何融入一个更大的框架,即机器人系统数据战略: 现场实验 (FX)、建模与仿真 (M&S)、实时虚拟建构 (LVC) 互操作性和分析档案重用。为了更广泛地展示潜在的活动,对互补的组件技术分别进行了综述。
结论和建议表明,支持无人系统开发的综合数据战略似乎已经具备了所有必要的主要组成部分。对未来工作的建议主要集中在建立数据收集和存档存储的最佳实践,从而使这种强大的能力组合成为一种普遍的能力。