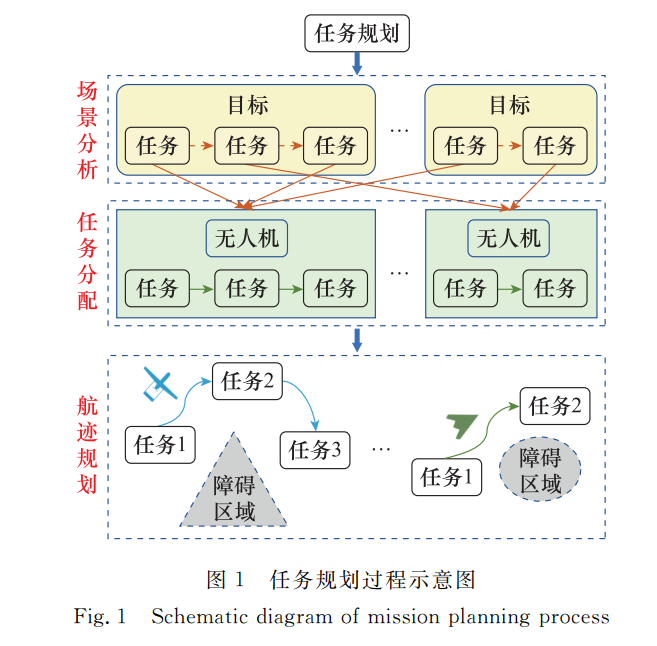
随着通信技术的发展, 未来多无人机系统将会朝向集群化、自主化和智能化方向发展。通过单元间的信息融合和能力互补, 多无人机系统可以打破自身能力壁垒, 形成多样化的任务能力。任务规划是多无人机系统协同应用的顶层设计, 属于带约束的组合优化问题, 是在任务需求、单元能力和环境态势的影响下, 优化求解获得满足要求的、优化的任务执行方案。从问题表征建模和方案求解评估两个角度梳理现有研究, 从场景分析、任务分配和航迹规划3个方面总结问题表征建模部分的研究, 从求解算法和效能评估两个方面总结方案求解评估部分的研究。最后, 分析未来无人机任务规划研究中值得关注的若干方向。 https://www.sys-ele.com/CN/10.12305/j.issn.1001-506X.2024.10.21 无人机作为智能无人系统中的“集大成者”,具有生存 能力高、适应性强、使用灵活等特点,被广泛应用在多种任 务场景[13]。当前,大型全能型无人机(如“死神”无人机、 “全球鹰”无人机等)系统集成度高且功能强大,但面对日益 复杂的任务需求,仍存在任务效费比低、系统容错性差、升 级周期长等缺陷。多无人机系统旨在将大型平台的功能分 散到空间分布的大量无人机,利用网络连接将这些功能相 对单一的低成本单元,通过合理调度,实现不同单元的动态 组合和密切协作,能够在兼具经济性的基础上达到甚至超 过大型平台的能力水平。 多无人机系统具有单元配置灵活、部署形式多样、任务 能力全面、系统冗余度高、经济成本低等优势,可以极大提 升未来战场的不对称优势,因此各国均积极部署大量研究 项目,将多无人机系统的应用扩展至多种任务领域[1]。各 国发展了以“女武神”“神经元”“小精灵”“郊狼”和“灰山鹑” 等项目为代表的无人机项目,部署了以系统集成技术和试 验项目、拒止环境中协同作战项目、分布式作战管理、蜂群 无人机应用等为代表的体系协同项目[23]。这些项目从集 群协同模式、分布式指挥架构、核心关键技术和集群应用演 示等方面进行大量探索,推动多无人机系统与现有装备体 系的有效融合,探索多样化的应用模式[4]。 未来多无人机系统将继续朝向集群化、自主化和智能 化的方向发展[4],其应用面临多样化的挑战:应用环境更为 复杂,存在不确定且强对抗性因素的干扰;任务需求更为多 样,机间协同压力更大;单元类型更加丰富,资源配置与调 度难度更大。因此,需要发展多无人机协同任务规划技术, 高效调度各单元并融合其任务能力,合理考虑多类因素干 扰以保证任务执行效果,自主调整任务指派及协同关系以 应对环境变化。任务方案不合理将无法体现出多无人机的 协同优势,甚至出现冲突碰撞危险。 任务规划是多无人机系统应用的顶层设计,是在场景 先验信息支撑下,在应用环境、任务需求和单元能力约束 下,充分考虑执行过程中的不确定因素,量化当前条件下的 可行资源配置与完成概率的关系,建立包含无人机配置、任 务映射关系、执行时间表和任务路径等在内的详尽任务执 行方案,并能够根据任务执行的过程变化及时对任务方案 进行调整,在正常情况下高效完成各项任务,并在强对抗情 况下最大限度地执行任务。 多无人机任务规划属于任务指派和资源分配范畴,是 一个带约束的组合优化问题[56],可分为模型构建和模型求 解两部分。从建模角度考虑,任务规划首先需要将多样化 的场景需求表征为任务组合,在旅行商问题、车辆路径问 题、广义指派问题、混合整数线性规划等模型[79]的基础上, 结合问题特有的约束条件和不确定因素进一步细化模型, 在优化目标牵引下引导模型求解,获得满足需求的任务方 案。从求解角度考虑,根据机间信息交互策略的不同,求解 算法可分为集中式和分布式两类[1011],需要结合场景需求 进行选择并改进,以适应不同场景下的任务规划求解需 求[1213]。效能评估是根据多方面指标对多无人机系统进行 的综合评价,可以发现系统的薄弱点并进行针对性改进。 本文从问题表征建模和方案求解评估两个角度对当前 研究进行梳理分析。问题表征建模分为场景分析、任务分 配和航迹规划3部分,其中场景表征部分分析任务、无人机 和环境3类要素;任务分配部分归纳与构建任务映射关系 相关的约束条件、不确定因素和优化目标;航迹规划分析单 机航迹计算和多机协同策略。从方案求解评估角度,列举 了常用的集中式和分布式算法及其改进要点,然后归纳了 多无人机协同应用的效能评估流程。最后,结合前序分析 给出未来研究中应当关注的部分方向。