成为VIP会员查看完整内容
VIP会员码认证
首页
主题
会员
服务
注册
·
登录
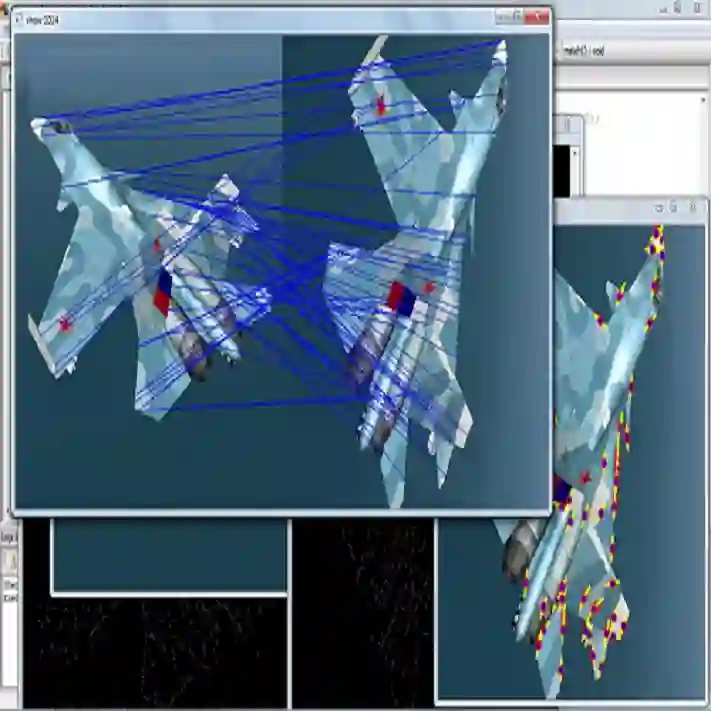
图像配准
关注
810
图像配准是图像处理研究领域中的一个典型问题和技术难点,其目的在于比较或融合针对同一对象在不同条件下获取的图像,例如图像会来自不同的采集设备,取自不同的时间,不同的拍摄视角等等,有时也需要用到针对不同对象的图像配准问题。具体地说,对于一组图像数据集中的两幅图像,通过寻找一种空间变换把一幅图像映射到另一幅图像,使得两图中对应于空间同一位置的点一一对应起来,从而达到信息融合的目的。 该技术在计算机视觉、医学图像处理以及材料力学等领域都具有广泛的应用。根据具体应用的不同,有的侧重于通过变换结果融合两幅图像,有的侧重于研究变换本身以获得对象的一些力学属性。
综合
百科
VIP
热门
动态
论文
精华
精品内容
多模态遥感图像配准方法研究综述
专知会员服务
19+阅读 · 2024年7月20日
深度学习视频超分辨率技术概述
专知会员服务
38+阅读 · 2022年7月18日
【AAAI2022】一种基于随机计划者-执行者-评论家模型的无监督图像柔性配准方法
专知会员服务
22+阅读 · 2022年2月3日
基于深度学习的医学影像配准综述
专知会员服务
30+阅读 · 2021年6月4日
参考链接
提示
微信扫码
咨询专知VIP会员与技术项目合作
(加微信请备注: "专知")
微信扫码咨询专知VIP会员
Top