成为VIP会员查看完整内容
VIP会员码认证
首页
主题
会员
服务
注册
·
登录
词向量表示
关注
37
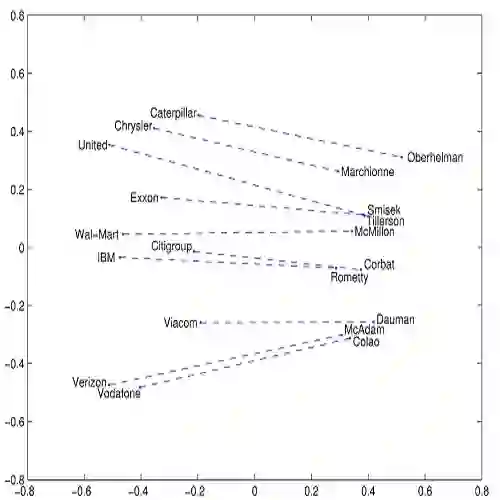
分散式表示即将语言表示为稠密、低维、连续的向量。 研究者最早发现学习得到词嵌入之间存在类比关系。比如apple−apples ≈ car−cars, man−woman ≈ king – queen 等。这些方法都可以直接在大规模无标注语料上进行训练。词嵌入的质量也非常依赖于上下文窗口大小的选择。通常大的上下文窗口学到的词嵌入更反映主题信息,而小的上下文窗口学到的词嵌入更反映词的功能和上下文语义信息。
综合
百科
VIP
热门
动态
论文
精华
精品内容
AAAI2022 | 因果推理下的词向量:降低性别偏见并保留语义信息
专知会员服务
24+阅读 · 2022年2月15日
基于深度学习的主题模型研究,中文综述,29页pdf,计算机学报
专知会员服务
124+阅读 · 2020年5月20日
【论文翻译】2020最新预训练语言模型综述:Pre-trained Models for Natural Language Processing: A Survey
专知会员服务
94+阅读 · 2020年4月13日
所有好的向量空间都是同构的吗?Are All Good Word Vector Spaces Isomorphic?
专知会员服务
9+阅读 · 2020年4月12日
【清华大学】Bert 简介,Bidirectional Encoder Representations from Transformers,21页ppt
专知会员服务
79+阅读 · 2019年12月29日
【中科院信工所】社交媒体情感分析,40页ppt
专知会员服务
104+阅读 · 2019年12月13日
基于图的word2vec负采样( GNEG:Graph-Based Negative Sampling for word2vec)
专知会员服务
40+阅读 · 2019年11月23日
【EMNLP 2019 最佳论文】信息瓶颈专门化单词嵌入(用于解析)(Specializing Word Embeddings(for Parsing)by Information Bottleneck)
专知会员服务
24+阅读 · 2019年11月20日
【CCL 2019】ATT-第19期:预训练模型--自然语言处理的新范式 (车万翔 )
专知会员服务
41+阅读 · 2019年11月12日
参考链接
提示
微信扫码
咨询专知VIP会员与技术项目合作
(加微信请备注: "专知")
微信扫码咨询专知VIP会员
Top