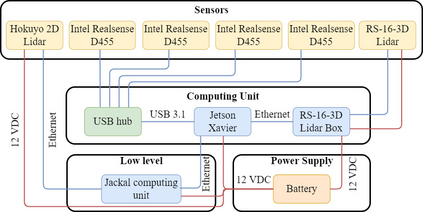
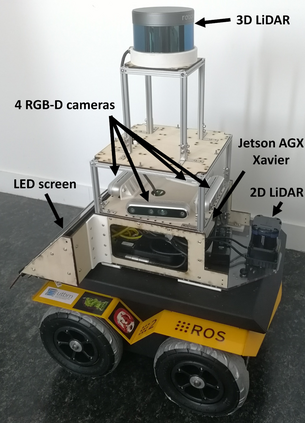
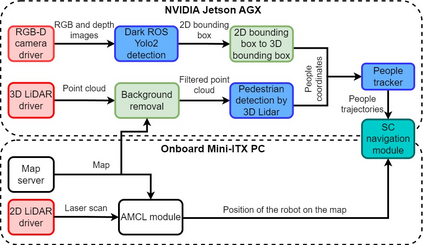
The social compatibility (SC) is one of the most important parameters for service robots. It characterises the interaction quality between a robot and a human. In this paper, we first introduce an open-source software-hardware integration scheme for socially-compliant robot navigation and then propose a human-centered benchmarking framework. For the former, we integrate one 3D lidar, one 2D lidar, and four RGB-D cameras for robot exterior perception. The software system is entirely based on the Robot Operating System (ROS) with high modularity and fully deployed to the embedded hardware-based edge while running at a rate that exceeds the release frequency of sensor data. For the latter, we propose a new human-centered performance evaluation metric that can be used to measure SC quickly and efficiently. The values of this metric correlate with the results of the Godspeed questionnaire, which is believed to be a golden standard approach for SC measurements. Together with other commonly used metrics, we benchmark two open-source socially-compliant robot navigation methods, in an end-to-end manner. We clarify all aspects of the benchmarking to ensure the reproducibility of the experiments. We also show that the proposed new metric can provide further justification for the selection of numerical metrics (objective) from a human perspective (subjective).
翻译:社会兼容性(SC)是服务机器人的最重要参数之一。 它描述机器人和人类之间的互动质量。 在本文中, 我们首先为符合社会要求的机器人导航引入开放源软件硬件集成计划, 然后提出以人为中心的基准框架。 对于前者, 我们整合了1 3D 里达尔、 1 2D 里达尔和 4 RGB- D 相机, 用于机器人外观。 软件系统完全基于高模块化的机器人操作系统( ROS), 并完全部署在嵌入的硬件边缘, 其速度超过传感器数据的发布频率。 对于后者, 我们提出一个新的以人为中心的性化性能评估标准, 可用于快速和高效测量SC。 这个标准的价值与 Godveld问卷的结果相关, 据信是用于测量SC 的黄金标准方法。 与其他常用的测量标准一起, 我们以端到端的方式设定了两种开放源的符合社会要求的机器人导航方法。 我们澄清了基准的各个方面, 以确保传感器数据的释放频率。 对于后者, 我们提出了一个新的以人为中心的业绩评价标准, 并且从新的指标角度展示了新的指标。 (我们还提出了从人类选择了新的指标) 。