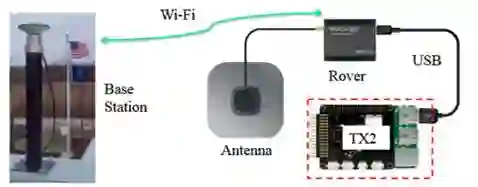
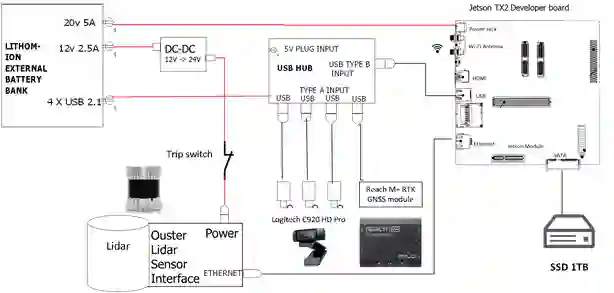
As one of the most popular micro-mobility options, e-scooters are spreading in hundreds of big cities and college towns in the US and worldwide. In the meantime, e-scooters are also posing new challenges to traffic safety. In general, e-scooters are suggested to be ridden in bike lanes/sidewalks or share the road with cars at the maximum speed of about 15-20 mph, which is more flexible and much faster than the pedestrains and bicyclists. These features make e-scooters challenging for human drivers, pedestrians, vehicle active safety modules, and self-driving modules to see and interact. To study this new mobility option and address e-scooter riders' and other road users' safety concerns, this paper proposes a wearable data collection system for investigating the micro-level e-Scooter motion behavior in a Naturalistic road environment. An e-Scooter-based data acquisition system has been developed by integrating LiDAR, cameras, and GPS using the robot operating system (ROS). Software frameworks are developed to support hardware interfaces, sensor operation, sensor synchronization, and data saving. The integrated system can collect data continuously for hours, meeting all the requirements including calibration accuracy and capability of collecting the vehicle and e-Scooter encountering data.
翻译:作为最受欢迎的微型移动选项之一,电子摩托车正在美国和全世界数百个大城市和大学城镇中推广。与此同时,电子摩托车也对交通安全提出了新的挑战。一般来说,建议电子摩托车骑在自行车车道/边行道上,或以最大速度约15至20米的速度与汽车共享道路,这比婴儿车和骑自行车者更灵活,速度更快。这些功能使得电子摩托车对人类驾驶员、行人、车辆主动安全模块和自动驾驶模块具有挑战性,以观察和互动。为了研究这种新的移动选项并解决电子摩托车驾驶员和其他道路使用者的安全关切,本文件提议建立一个可磨损的数据收集系统,以调查自然道路环境中的微型电子摩托车运动行为,该系统比婴儿车和骑自行车者和骑自行车者更灵活、更快捷。一个基于电子摩托车的数据获取系统已经开发,通过机器人操作系统(ROS)整合LDAR、照相机和全球定位系统,对人驾驶员、车辆主动安全模块和自动驾驶模块提出了挑战。软件框架将支持硬件接口、感应变器操作能力,包括收集所有车辆数据、感应变能力,以持续收集数据和感应变能力。