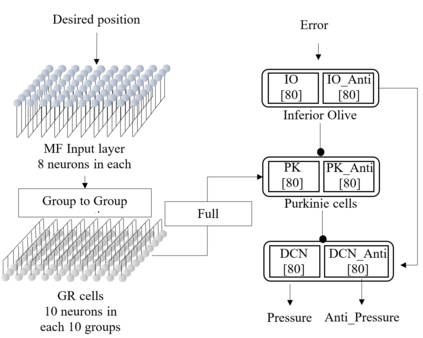
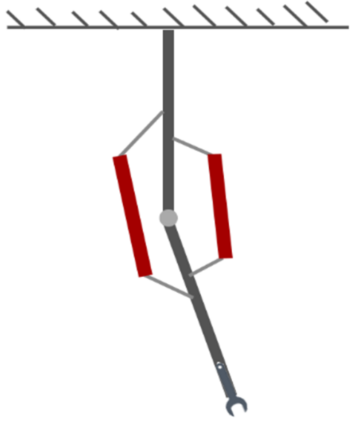
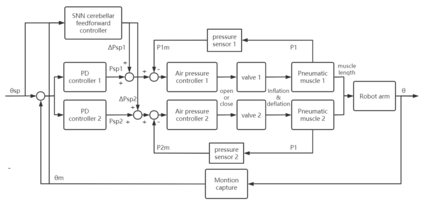
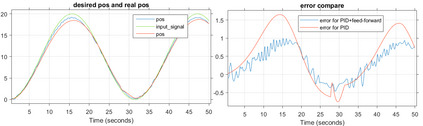
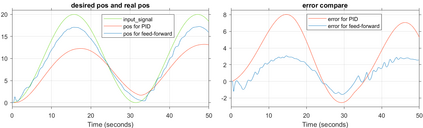
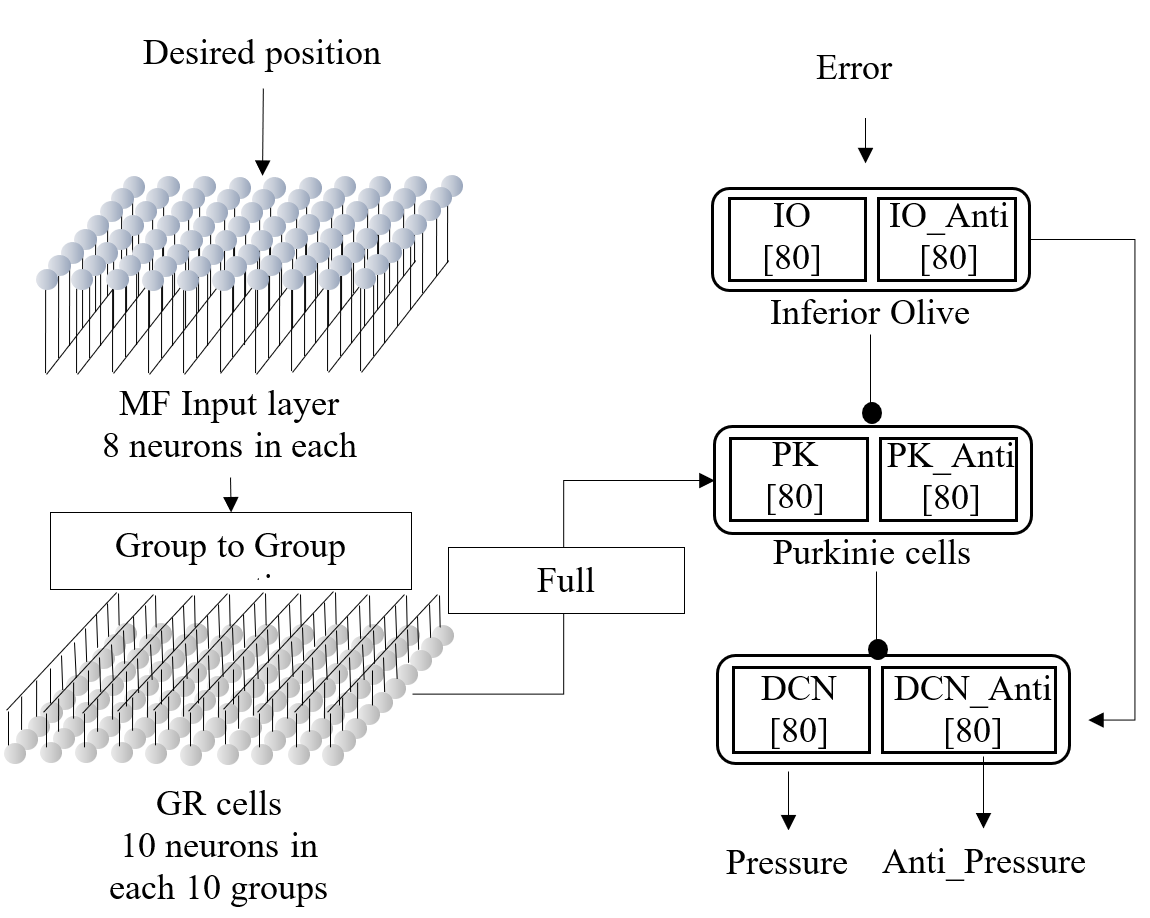
Soft robotics technologies have gained growing interest in recent years, which allows various applications from manufacturing to human-robot interaction. Pneumatic artificial muscle (PAM), a typical soft actuator, has been widely applied to soft robots. The compliance and resilience of soft actuators allow soft robots to behave compliant when interacting with unstructured environments, while the utilization of soft actuators also introduces nonlinearity and uncertainty. Inspired by Cerebellum's vital functions in control of human's physical movement, a neural network model of Cerebellum based on spiking neuron networks (SNNs) is designed. This model is used as a feed-forward controller in controlling a 1-DOF robot arm driven by PAMs. The simulation results show that this Cerebellar-based system achieves good performance and increases the system's response.
翻译:近年来,软机器人技术引起了越来越多的兴趣,使得从制造到人-机器人互动的各种应用能够从制造到人-机器人互动。典型的软动动因气动人肌肉(PAM)被广泛应用于软机器人。软动能机的合规性和弹性允许软机器人在与无结构环境进行互动时遵守规则,而软动能机的利用也带来了非线性和不确定性。在Cerebellum控制人类身体运动的重要功能的启发下,设计了一个基于spigking神经网络的Cerebellum神经网络模型(SNN),该模型被用作向前控制由PAMS驱动的1-DOF机器人臂的进料控制器。模拟结果表明,这个基于Cerebellar的系统取得了良好的性能,提高了系统的反应能力。