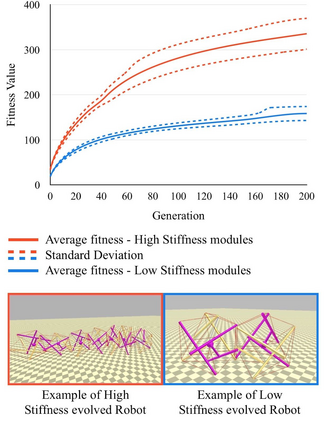
Tensegrity structures are lightweight, can undergo large deformations, and have outstanding robustness capabilities. These unique properties inspired roboticists to investigate their use. However, the morphological design, control, assembly, and actuation of tensegrity robots are still difficult tasks. Moreover, the stiffness of tensegrity robots is still an underestimated design parameter. In this article, we propose to use easy to assemble, actuated tensegrity modules and body-brain co-evolution to design soft tensegrity modular robots. Moreover, we prove the importance of tensegrity robots stiffness showing how the evolution suggests a different morphology, control, and locomotion strategy according to the modules stiffness.
翻译:感官结构是轻量的,可以发生巨大的变形,并且具有卓越的坚固能力。 这些独特的特性激励机器人学家来调查它们的使用。 然而, 紧张机器人的形态设计、 控制、 组装和激活仍然是困难的任务。 此外, 紧张机器人的僵硬性仍然是一个低估了的设计参数。 在文章中, 我们提议使用易于组装、 引发的紧张模块和身体- 脑共变来设计软紧张模块机器人。 此外, 我们证明了紧张机器人的僵硬性的重要性, 表明进化如何根据模块的坚硬性显示不同的形态、 控制和移动战略 。