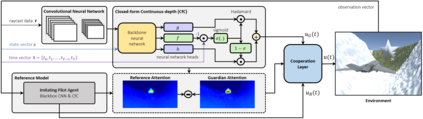
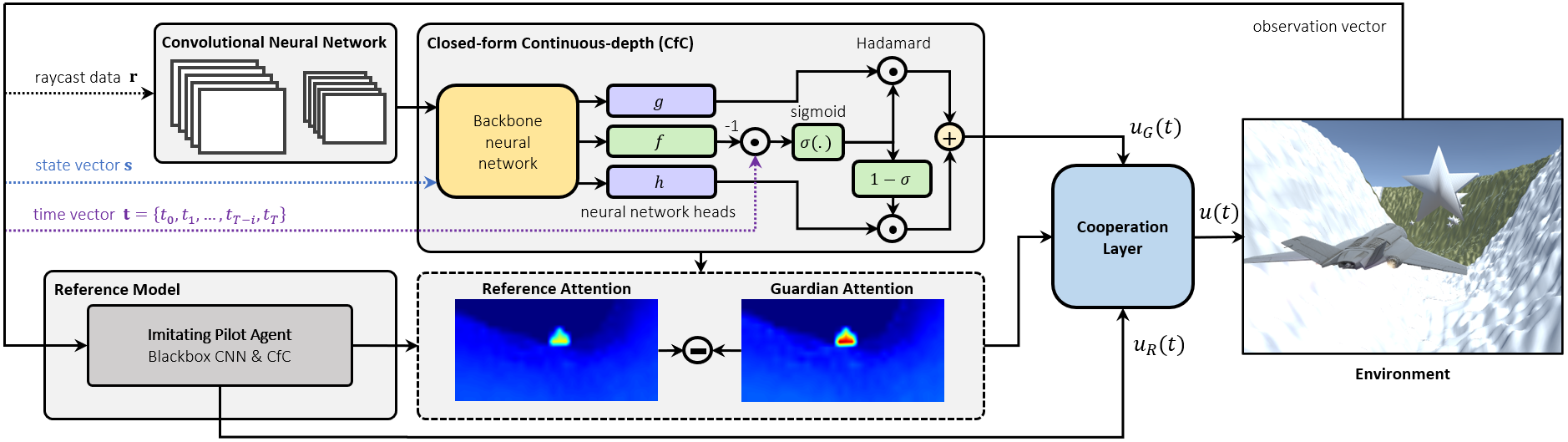
The cooperation of a human pilot with an autonomous agent during flight control realizes parallel autonomy. A parallel-autonomous system acts as a guardian that significantly enhances the robustness and safety of flight operations in challenging circumstances. Here, we propose an air-guardian concept that facilitates cooperation between an artificial pilot agent and a parallel end-to-end neural control system. Our vision-based air-guardian system combines a causal continuous-depth neural network model with a cooperation layer to enable parallel autonomy between a pilot agent and a control system based on perceived differences in their attention profile. The attention profiles are obtained by computing the networks' saliency maps (feature importance) through the VisualBackProp algorithm. The guardian agent is trained via reinforcement learning in a fixed-wing aircraft simulated environment. When the attention profile of the pilot and guardian agents align, the pilot makes control decisions. If the attention map of the pilot and the guardian do not align, the air-guardian makes interventions and takes over the control of the aircraft. We show that our attention-based air-guardian system can balance the trade-off between its level of involvement in the flight and the pilot's expertise and attention. We demonstrate the effectivness of our methods in simulated flight scenarios with a fixed-wing aircraft and on a real drone platform.
翻译:在飞行控制期间,与自主代理人进行人体实验的合作实现了平行自主;平行自主系统作为监护人,大大增强飞行作业在具有挑战性的情况下的稳健性和安全性;在这里,我们提出一个空中护卫概念,促进人工试验代理人与平行端对端神经控制系统之间的合作;我们基于视觉的空中护卫系统将因果关系连续深入的神经网络模式与合作层结合起来,使试验代理人与基于其注意力差异的控制系统并行自主;通过视觉BackProp算法计算网络突出的地图(功能重要性),从而获得注意特征;通过在模拟的固定翼飞机环境中强化学习,对监护人进行培训;当飞行员和监护代理人的注意特征一致时,则作出控制决定;如果飞行员和监护人的注意分布图不一致,则进行干预并控制飞机;我们表明,我们基于注意的空中护卫系统能够平衡其飞行参与水平与飞行试验平台和飞行控制影响之间的交易;我们展示了我们飞行定位平台上的实际飞行定位和注意力。